-
1 высокочастотная детонация
auditory flutter, ( в диапазоне выше 10 Гц) flutterРусско-английский словарь по электронике > высокочастотная детонация
-
2 высокочастотная детонация
auditory flutter, ( в диапазоне выше 10 Гц) flutterРусско-английский словарь по радиоэлектронике > высокочастотная детонация
-
3 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
-
4 термомеханическая обработка
термомеханическая обработка
ТМО
Совокупность операций обработки сталей и сплавов давлением и термической обработки, отличающаяся тем, что повышающаяся в результатете пластической деформации плотность дефектов кристаллической решетки в той или иной форме наследуется структурой, формирующейся при последующей термической обработке. Процессы обработки давлением и термической обработки при ТМО могут быть совмещены в одной технологической операции и разделены во времени. ТМО сталей, как эффективный способ повышения их прочности, начали активно исследовать в 1950-х гг. В настоящее время применительно к сталям (преимущественно легированным) промышленное использование находят 4 способа ТМО, разнящиеся температурами деформирования аустенита и условиями последующего охлаждения:
- низкотемпературная механическая обработка (НТМО), или «аусформинг» по зарубежной терминологии, которая состоит из деформирования переохлажденного аустенита в интервале температур его повышенной устойчивости (ниже критических точек А} и /4,), закалки и низкого отпуска;
- высокотемпературная термомеханическая обработка (ВТМО), когда аустенит деформируют в области его термодинамической стабильности (выше критических точек и температуры рекристаллизации), затем подвергают закалке с отпуском;
- высокотемпературная термомеханическая обработка с диффузионным (перлитным) распадом (ВТМизО) или «изоморфинг» по зарубежной терминологии, когда сталь после аустенитизации подстуживают до температуры перлитного превращения и деформируют во время этого превращения;
- низкокотемпературная термомеханическая обработка с деформацией переохлажденного аустенита при температуре бейнитного превращения (НТМизО).
НТМО и НТМизО применимы только для легированных сталей с повышенной устойчивостью переохлажденного аустенита и требуют для деформирования мощного оборудования, что ограничивает их промышленное использование.
НТМО конструкционных легированных сталей позволяет повысить их предел текучести до 2,8-3,0 ГПа при относительном удлинении ~ 6 %. Наилучший комплекс механических свойств стали после ВТМО достигается, когда мартенсит образуется из деформированного аустенита с хорошо развитой полигонизованной структурой. После ВТМО предел текучести низко- и среднелегированных конструкционных сталей достигает 1,9—2,2 ГПа при более высоких показателях пластичности и вязкости по сравнению с НТМО. ВТМизО и НТМизО сопровождаются общим диспергированием структуры перлита и бейнита соответственно, что обеспечивает повышение не только прочностных свойств, но и показателей вязкости разрушения.
[ http://metaltrade.ru/abc/a.htm]Тематики
Синонимы
EN
3.3.2 термомеханическая обработка (thermomechanical forming): Обработка, при которой заключительная деформация осуществляется в определенном температурном диапазоне, что приводит к свойствам материала с заданными параметрами, которые невозможно достигнуть или повторить только при одной термообработке. Последующий нагрев выше температуры 580 °С может понизить значение прочности.
Буквенное обозначение данного условия поставки - М.
Примечание 1 - Термомеханическая обработка, которая соответствует условию поставки М, может включать в себя процессы с возрастающей скоростью охлаждения и отпуском (или без отпуска), в том числе самоотпуск, но исключая непосредственную закалку и закалку с отпуском.
Примечание 2 - При снижении содержания углерода и углеродного эквивалента материала, соответствующего условиям поставки М, улучшается свариваемость.
Источник: ГОСТ Р ИСО 3183-2-2007: Трубы стальные для трубопроводов. Технические условия. Часть 2. Требования к трубам класса В оригинал документа
3.3.2 термомеханическая обработка (thermomechanical forming): Процесс деформирования, при котором заключительная фаза деформации осуществляется в определенном температурном диапазоне, что приводит к свойствам материала с заданными параметрами, которые невозможно достигнуть или повторить только при одной термообработке.
Примечание 1 - Последующее нагревание выше 580 °C может понизить значения прочности.
Примечание 2 - Буквенное обозначение данного условия поставки - М.
Примечание 3 - Термомеханическая обработка, которая соответствует условию поставки М, может включать в себя процессы с возрастающей скоростью охлаждения и отпуском (или без отпуска), в том числе самоотпуск, но исключая непосредственную закалку и закалку с отпуском.
Источник: ГОСТ Р ИСО 3183-3-2007: Трубы стальные для трубопроводов. Технические условия. Часть 3. Требования к трубам класса С оригинал документа
Русско-английский словарь нормативно-технической терминологии > термомеханическая обработка
-
5 устройство защиты от импульсных перенапряжений
- voltage surge protector
- surge protector
- surge protective device
- surge protection device
- surge offering
- SPD
устройство защиты от импульсных перенапряжений
УЗИП
Устройство, которое предназначено для ограничения переходных перенапряжений и отвода импульсных токов. Это устройство содержит по крайней мере один нелинейный элемент.
[ ГОСТ Р 51992-2011( МЭК 61643-1: 2005)]
устройство защиты от импульсных разрядов напряжения
Устройство, используемое для ослабления действия импульсных разрядов перенапряжений и сверхтоков ограниченной длительности. Оно может состоять из одного элемента или иметь более сложную конструкцию. Наиболее распространенный тип SPD - газонаполненные разрядники.
(МСЭ-Т K.44, МСЭ-Т K.46, МСЭ-Т K.57,, МСЭ-Т K.65, МСЭ-Т K.66)
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]См. также:
- импульсное перенапряжение
-
ГОСТ Р 51992-2011( МЭК 61643-1: 2005)
Устройства защиты от импульсных перенапряжений низковольтные.
Часть 1. Устройства защиты от импульсных перенапряжений в низковольтных силовых распределительных системах.
Технические требования и методы испытаний
КЛАССИФИКАЦИЯ (по ГОСТ Р 51992-2011( МЭК 61643-1: 2005))
-
По числу вводов:
-
По способу выполнения защиты от перенапряжения:
-
По испытаниям УЗИП
-
По местоположению:
- внутренней установки
-
наружной установки.
Примечание - Для УЗИП, изготовленных и классифицируемых исключительно для наружной установки и монтируемых недоступными, вообще не требуется соответствия требованиям относительно защиты от воздействующих факторов внешней среды
-
По доступности:
- доступное
-
недоступное
Примечание - Недоступное означает невозможность доступа без помощи специального инструмента к частям, находящимся под напряжением
-
По способу установки
-
По местоположению разъединителя УЗИП:
- внутренней установки
- наружной установки
- комбинированной (одна часть внутренней установки, другая - наружной установки)
-
По защитным функциям:
- с тепловой защитой
- с защитой от токов утечки
- с защитой от сверхтока.
-
По защите от сверхтока:
- По степени защиты, обеспечиваемой оболочками согласно кодам IP
-
По диапазону температур
-
По системе питания
- переменного тока частотой от 48 до 62 Гц
- постоянного тока
- переменного и постоянного тока;
ВОПРОС: ЧТО ТАКОЕ ТИПЫ И КЛАССЫ УЗИП ?
Согласно классификации ГОСТ, МЭК а также немецкого стандарта DIN, Устройства Защиты от Импульсных Перенапряжений УЗИП делятся на разные категории по методу испытаний и месту установки.
Класс 1 испытаний соответствует Типу 1 и Классу Требований B
Класс 2 испытаний соответствует Типу 2 и Классу Требований C
Класс 3 испытаний соответствует Типу 3 и Классу Требований D
ВОПРОС: ЧЕМ УЗИП ТИП 1 ОТЛИЧАЕТСЯ ОТ УЗИП ТИП 2?
УЗИП тип 1 устанавливаются на вводе в здание при воздушном вводе питания или при наличии системы внешней молниезащиты. УЗИП в схеме включения предназначен для отвода части прямого тока молнии. В соответствии с ГОСТ Р 51992-2002, УЗИП 1-го класса испытаний ( тип 1) испытываются импульсом тока с формой волны 10/350 мкс.
УЗИП тип 2 служат для защиты от наведённых импульсов тока и устанавливаются либо после УЗИП тип 1, либо на вводе в здание при отсутствии вероятности попадания части тока молнии. УЗИП 2 класса испытаний (тип 2) испытываются импульсом тока с формой 8/20 мкс.
ВОПРОС: ГДЕ ПРИМЕНЯЕТСЯ УЗИП ТИПА 3 ?
Устройства для Защиты от Импульсных Перенапряжений Типа 3 предназначены для "тонкой" защиты наиболее ответственного и чувствительного электрооборудования, например медицинской аппаратуры, систем хранения данных и пр. УЗИП Типа 3 необходимо устанавливать не далее 5 метров по кабелю от защищаемого оборудования. Модификации УЗИП Типа 3 могут быть выполнены в виде адаптера сетевой розетки или смонтированы непосредственно в корпусе или на шасси защищаемого прибора. Для бытового применения доступна версия MSB06 скрытого монтажа, за обычной сетевой розеткой.ВОПРОС: ЗАЧЕМ НУЖЕН СОГЛАСУЮЩИЙ ДРОССЕЛЬ?
Для правильного распределения мощности импульса между ступенями защиты ставят линию задержки в виде дросселя индуктивностью 15 мкГн или отрезок кабеля длиной не менее 15 м, имеющего аналогичную индуктивность. В этом случае сначала сработает УЗИП 1-го класса и возьмёт на себя основную энергию импульса, а затем устройство 2-го класса ограничит напряжение до безопасного уровня.ВОПРОС: ЗАЧЕМ СТАВИТЬ УЗИП, ЕСЛИ НА ВВОДЕ УЖЕ СТОИТ АВТОМАТ ЗАЩИТЫ И УЗО?
Вводной автомат (например на 25, 40, 63 А) защищает систему электроснабжения от перегрузки и коротких замыканий со стороны потребителя. Устройство защитного отключения УЗО (например, с током отсечки 30 или 100 мА) защищает человека от случайного поражения электрическим током.
Но ни одно из этих устройств не может защитить электрическую сеть и оборудование от микросекундных импульсов большой мощности. Такую защиту обеспечивает только Устройство Защиты от Импульсных Перенапряжений УЗИП со временем срабатывания в наносекундном диапазоне.ВОПРОС: КАКОЕ УСТРОЙСТВО ЛУЧШЕ ЗАЩИТИТ ОТ ГРОЗЫ: УЗИП ИЛИ ОПН ?
УЗИП - это официальное (ГОСТ) наименование всего класса устройств для защиты от последствий токов молний и импульсных перенапряжений в сетях до 1000 В. В литературе, в публикациях в интернете до сих пор встречаются названия - ОПН (Ограничитель перенапряжения), Разрядник, Молниеразрядник, Грозоразрядник - которые применительно к сетям до 1000 Вольт означают по сути одно устройство - это УЗИП. Для организации эффективной молниезащиты необходимо обращать внимание не на название устройства, а на его характеристики.ВОПРОС: КАК СРАВНИТЬ УЗИП РАЗНЫХ ПРОИЗВОДИТЕЛЕЙ?
Все УЗИП, продаваемые на территории России, должны производиться и испытываться в соответствии с ГОСТ Р 51992-2002( аналог международного стандарта МЭК 61643-1-98). ГОСТ Р 51992-2002 предусматривает наличие у каждого устройства ряда характеристик, которые производитель обязан указать в паспорте и на самом изделии.
Класс испытаний (Тип) 1, 2 или 3
Импульсный ток Iimp (10/350 мкс) для УЗИП 1 класса
Номинальный импульсный ток In (8/20 мкс)
Максимальный импульсный ток Imax (8/20 мкс)
Уровень напряжения защиты Up, измеренный при In
По этим характеристикам и происходит сравнение. Замечание: некоторые производители указывают значения импульсных токов на фазу (модуль), а другие - на устройство в целом. Для сравнения их надо приводить к одному виду.[ http://www.artterm-m.ru/index.php/zashitaseteji1/faquzip]
ОСОБЕННОСТИ ЭКСПЛУАТАЦИИ УСТРОЙСТВ ЗАЩИТЫ ОТИМПУЛЬСНЫХ ПЕРЕНАПРЯЖЕНИЙ В НИЗКОВОЛЬТНЫХ СИЛОВЫХ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЯХЗОРИЧЕВ А.Л.,
заместитель директора
ЗАО «Хакель Рос»
В предыдущих номерах журнала были изложены теоретические основы применения устройств защиты от импульсных перенапряжений (УЗИП) в низковольтных электрических сетях. При этом отмечалась необходимость отдельного более детального рассмотрения некоторых особенностей эксплуатации УЗИП, а также типовых аварийных ситуаций, которые могут возникнуть при этом.
1. Диагностика устройств защиты от перенапряженияКонструкция и параметры устройств защиты от импульсных перенапряжения постоянно совершенствуются, повышается их надежность, снижаются требования по техническому обслуживанию и контролю. Но, не смотря на это, нельзя оставлять без внимания вероятность их повреждения, особенно при интенсивных грозах, когда может произойти несколько ударов молнии непосредственно в защищаемый объект или вблизи от него во время одной грозы. Устройства защиты, применяемые в низковольтных электрических сетях и в сетях передачи информации подвержены так называемому старению (деградации), т.е. постепенной потере своих способностей ограничивать импульсные перенапряжения. Интенсивнее всего процесс старения протекает при повторяющихся грозовых ударах в течении короткого промежутка времени в несколько секунд или минут, когда амплитуды импульсных токов достигают предельных максимальных параметров I max (8/20 мкс) или I imp (10/350 мкс) для конкретных типов защитных устройств.Повреждение УЗИП происходит следующим образом. Разрядные токи, протекающие при срабатывании защитных устройств, нагревают корпуса их нелинейных элементов до такой температуры, что при повторных ударах с той же интенсивностью (в не успевшее остыть устройство) происходит:
− у варисторов - нарушение структуры кристалла (тепловой пробой) или его полное разрушение;
− у металлокерамических газонаполненных разрядников (грозозащитных разрядников) - изменение свойств в результате утечки газов и последующее разрушение керамического корпуса;− у разрядников на основе открытых искровых промежутков -за счет взрывного выброса ионизированных газов во внутреннее пространство распределительного щита могут возникать повреждения изоляции кабелей, клеммных колодок и других элементов электрического шкафа или его внутренней поверхности. На практике известны даже случаи значительной деформации металлических шкафов, сравнимые только с последствиями взрыва ручной гранаты. Важной особенностью при эксплуатации разрядников этого типа в распределительных щитах является также необходимость повышения мер противопожарной безопасности.
По указанным выше причинам все изготовители устройств защиты от перенапряжения рекомендуют осуществлять их регулярный контроль, особенно после каждой сильной грозы. Проверку необходимо осуществлять с помощью специальных тестеров, которые обычно можно заказать у фирм, занимающихся техникой защиты от перенапряжений. Контроль, осуществляемый другими способами, например, визуально или с помощью универсальных измерительных приборов, в этом случае является неэффективным по следующим причинам:
− Варисторное защитное устройство может быть повреждёно, хотя сигнализация о выходе варистора из строя не сработала. Варистор может обладать искажённой вольтамперной характеристикой (более высокая утечка) в области токов до 1 мA (область рабочих токов при рабочем напряжении сети; настоящую область не возможно проверить с помощью обычно применяемых приборов). Проверка осуществляется минимально в 2-х точках характеристики, напр. при 10 и 1000 мкА, с помощью специального источника тока с высоким подъёмом напряжения (1 до 1,5 кВ).
− Металлокерамический газонаполненный (грозовой) разрядник - с помощью визуального контроля можно заметить только поврежденный от взрыва внешний декоративный корпус устройства (или его выводы). Что бы выяснить состояние самого разрядника необходимо разобрать внешний корпус, но даже при таком контроле практически нельзя обнаружить утечку его газового заряда. Контроль напряжения зажигания грозового разрядника с помощью обыкновенных измерительных приборов выполнить очень трудно, он осуществляется при помощи специализированных тестеров.
− Разрядник с открытым искровым промежутком - проверку исправной работы можно осуществить только после его демонтажа и измерения с помощью генератора грозового тока с характеристикой 10/350 мкс по заказу у изготовителя устройств для защиты от импульсных перенапряжений.
2. Защита от токов утечки и короткого замыкания в устройствах защиты от импульсных перенапряжений
Основным принципом работы устройства защиты от импульсных перенапряжений является выравнивание потенциалов между двумя проводниками, одним из которых является фазный (L) проводник, а другим нулевой рабочий (N) или (РЕN) проводник, т.е. устройство включается параллельно нагрузке. При этом, в случае выхода из строя УЗИП (пробой изоляции, пробой или разрушение нелинейного элемента) или невозможности гашения сопровождающего тока (в случае применения искровых разрядников или разрядников скользящего разряда) возможно возникновение режима короткого замыкания между данными проводниками, что может привести к повреждению электроустановки и даже возникновению пожара. Стандартами МЭК предусматривается два обязательных способа защиты электроустановок потребителя 220/380 В от подобного рода ситуаций.
2.1. Устройство теплового отключения в варисторных устройствах защиты от импульсных перенапряжений
Имеющееся в варисторных ограничителях перенапряжений устройство отключения при перегреве (тепловая защита), как правило, срабатывает в результате процесса старения варистора. Суть явления заключается в том, что при длительной эксплуатации, а также в результате воздействий импульсов тока большой амплитуды происходит постепенное разрушение p-n переходов в структуре варистора, что приводит к снижению значения такого важного параметра, как наибольшее длительно допустимое рабочее напряжение защитного устройства (максимальное рабочее напряжение) Uc. Этот параметр определяется для действующего напряжения электрической сети и указывается производителями защитных устройств в паспортных данных и, как правило, непосредственно на корпусе защитного устройства. Для примера: если на корпусе защитного устройства указано значение Uc = 275 В, это обозначает, что устройство будет нормально функционировать в электропитающей сети номиналом 220 В при увеличении действующего напряжения на его клеммах до 275 В включительно (значение взято с достаточным запасом при условии выполнения электроснабжающей организацией требований ГОСТ 13109 «Нормы качества электрической энергии в системах электроснабжения общего назначения»).
В результате «старения» варистора значение Uc снижается и в определенный момент времени может оказаться меньше чем действующее напряжение в сети. Это приведет к возрастанию токов утечки через варистор и быстрому повышению его температуры, что может вызвать деформацию корпуса устройства, проплавление фазными клеммами пластмассы и, в конечном итоге, короткое замыкание на DIN-рейку и даже пожар.
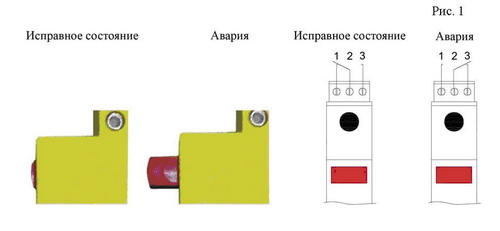
В связи с этим, для применения в электроустановках рекомендуются только те варисторные ограничители перенапряжения, которые имеют в своем составе устройство теплового отключения (терморазмыкатель). Конструкция данного устройства, как правило, очень проста и состоит из подпружиненного контакта, припаянного легкоплавким припоем к одному из выводов варистора, и связанной с ним системы местной сигнализации. В некоторых устройствах дополнительно применяются «сухие» контакты для подключения дистанционной сигнализации о выходе ограничителя перенапряжений из строя, позволяющие с помощью физической линии передавать информацию об этом на пульт диспетчера или на вход какой-либо системы обработки и передачи телеметрических данных. (См. рис. 1).
2.2. Применение быстродействующих предохранителей для защиты от токов короткого замыкания
Несколько другая ситуация возникает в случае установившегося длительного превышения действующего напряжения в сети над наибольшим длительно допустимым рабочим напряжением защитного устройства (Uc), определенным ТУ для данного УЗИП. Примером такой ситуации может быть повышение напряжения по вине поставщика электроэнергии или обрыв (отгорание) нулевого проводника при вводе в электроустановку (в трехфазной сети с глухозаземленной нейтралью трансформатора). Как известно, в последнем случае к нагрузке может оказаться приложенным межфазное напряжение 380 В. При этом устройство защиты от импульсных перенапряжений сработает, и через него начнет протекать ток. Величина этого тока будет стремиться к величине тока короткого замыкания (рассчитывается по общеизвестным методикам для каждой точки электроустановки) и может достигать нескольких сотен ампер. Практика показывает, что устройство тепловой защиты не успевает отреагировать в подобных ситуациях из-за инерционности конструкции. Варистор, как правило, разрушается в течение нескольких секунд, после чего режим короткого замыкания также может сохраняться через дугу (по продуктам разрушения и горения варистора). Как же как и в предыдущем случае, возникает вероятность замыкания клемм устройства на корпус шкафа или DIN-рейку при расплавлении пластмассы корпуса и возможность повреждения изоляции проводников в цепях включения защитных устройств. Сказанное выше относится не только к варисторным ограничителям, но и к УЗИП на базе разрядников, которые не имеют в своем составе устройства теплового отключения. На фотографии (рис. 2) показаны последствия подобной ситуации, в результате которой произошел пожар в распределительном щите.

Рис.2 Выход из строя варисторного УЗИП привел к пожару в ГРЩ.
На рисунке 3 показано варисторное УЗИП, которое в результате аварийной ситуации стало источником пожара в щите.
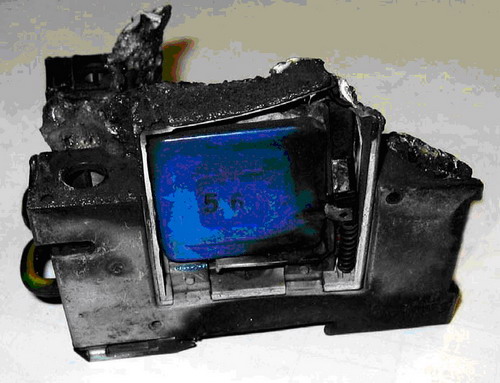
Рис.3
Для того чтобы предотвратить подобные последствия рекомендуется устанавливать последовательно с устройствами защиты от импульсных перенапряжений предохранители с характеристиками срабатывания gG или gL (классификация согласно требованиям стандартов ГОСТ Р 50339. 0-92 ( МЭК 60269-1-86) или VDE 0636 (Германия) соответственно).
Практически все производители устройств защиты от импульсных перенапряжений в своих каталогах приводят требования по номинальному значению и типу характеристики срабатывания предохранителей дополнительной защиты от токов короткого замыкания. Как уже указывалось выше, для этих целей используются предохранители типа gG или gL, предназначенные для защиты проводок и распределительных устройств от перегрузок и коротких замыканий. Они обладают значительно меньшим (на 1-2 порядка) временем срабатывания по сравнению с автоматическими выключателями тех же номиналов. При этом предохранители имеют более высокую стойкость к импульсным токам значительных величин. Практический опыт и данные экспериментальных испытаний показывают, что автоматические выключатели очень часто повреждаются при воздействии импульсных перенапряжений. Известны случаи подгорания контактов или приваривания их друг к другу. И в том и в другом случае автоматический выключатель не сможет в дальнейшем выполнять свои функции.
Возможны различные варианты применения предохранителей и, соответственно, существует ряд особенностей, которые необходимо учитывать еще на этапе проектирования схемы электроснабжения или при изготовлении щитовой продукции. Одна из таких особенностей заключается в том, что в случае, если в качестве защиты от токов короткого замыкания будет использоваться только общая защита (вводные предохранители), то при коротком замыкании в любом УЗИП (первой, второй или третьей ступени) всегда будет обесточиваться вся электроустановка в целом или какая-то ее часть. Применение предохранителей, включенных последовательно с каждым защитным устройством, исключает такую ситуацию. Но при этом встает вопрос подбора предохранителей с точки зрения селективности (очередности) их срабатывания. Решение этого вопроса осуществляется путем применения предохранителей тех типов и номиналов, которые рекомендованы производителем конкретных моделей устройств защиты от перенапряжений.
Пример установки предохранителей F7-F12 приведен на рисунке 4.

Рис.4 Установка защитных устройств в TN-S сеть 220/380 В
ПРИМЕР: При использовании в схеме, приведенной на рисунке 4, разрядников HS55 в первой ступени защиты и варисторных УЗИП PIII280 во второй ступени применение предохранителей F5-F7 и F8-F10 будет обусловлено выбором номинального значения предохранителей F1-F3:
· При значении F1-F3 более 315 А gG, значения F7-F9 и F10-F12 выбираются 315 А gG и 160 А gG соответственно;
· При значении F1-F3 менее 315 А gG, но более 160 А gG, предохранители F7-F9 можно не устанавливать, F10-F12 выбираются - 160 А gG;
· При значении F1-F3 менее 160 А gG, предохранители F7-F12 можно не устанавливать.
Иногда может потребоваться, чтобы в случае возникновения короткого замыкания в защитных устройствах не срабатывал общий предохранитель на вводе электропитающей установки. Для этого необходимо устанавливать в цепи каждого УЗИП предохранители с учетом коэффициента (1,6). Т.е. если предохранитель на входе электроустановки имеет номинальное значение 160 А gG, то предохранитель включенный последовательно с УЗИП должен иметь номинал 100 А gG.
Применение для данных целей автоматических выключателей осложняется причинами, перечисленными выше, а также не соответствием их времятоковых характеристик характеристикам предохранителей.
3. Часто встречающиеся недостатки в конструктивном исполнении устройств защиты от импульсных перенапряжений
Многими фирмами-производителями предлагаются защитные устройства классов I и II, состоящие из базы, предназначенной для установки на DIN-рейку, и сменного модуля с нелинейным элементом (разрядником или варистором) с ножевыми вставными контактами. Такое конструктивное исполнение кажется на вид более выгодным и удобным для заказчика, чем монолитный корпус, в виду возможности более простого осуществления измерения сопротивления изоляции электропроводки (при измерениях повышенными напряжениями этот модуль можно просто изъять). Однако способность сконструированных таким способом контактов пропускать импульсные токи не превышает предел Imax = 25 kA для волны (8/20 мкс) и Iimp = 20 kA для волны (10/350 мкс).
Несмотря на это, некоторые изготовители показывают в рекламных каталогах для таких защитных устройств максимальные разрядные способности величинами до Imax = 100 kA (8/20 мкс) или Iimp = 25 kA (10/350 мкс). К сожалению, это не подтверждается практическими данными. Уже при первом ударе испытательного импульса тока с такой амплитудой произойдут пережоги и разрушение не только ножевых контактов сменного модуля, но также и повреждение контактов клемм в базе. Разрушительное воздействие испытательного импульса тока Imax = 50 kA (8/20 мкс) на механическую часть такой системы и ножевой контакт показано на следующих фотографиях (рис. 5). Очевидно, что после такого воздействия сложным становится, собственно, сам вопрос извлечения вставки из базы, так как их контакты могут привариться друг к другу. Даже если вставку удастся отсоединить от базы, последнюю будет нельзя использовать далее из-за подгоревших контактов, которые приведут к резкому возрастанию переходного сопротивления и, соответственно, уровня защиты данного УЗИП.
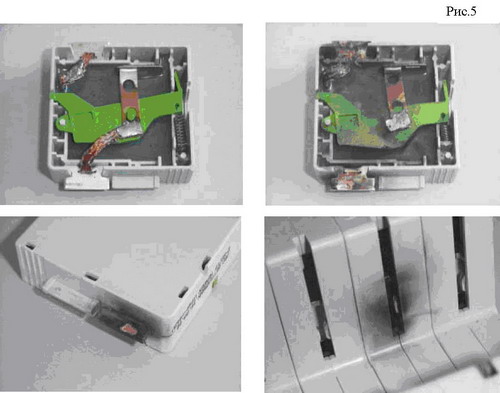
Для того чтобы избежать подобных последствий, защитные устройства модульной конструкции необходимо применять только тогда, когда существует гарантия, что ожидаемые импульсные воздействия не превысят указанных выше значений. Это может быть выполнено в случае правильного выбора типов и классов УЗИП для конкретной электроустановки и согласования их параметров между ступенями защиты.
4. Использование УЗИП для защиты вторичных источников питания
Одним из наиболее часто используемых вторичных источников питания является выпрямитель. Следует отметить, что практика установки элементов защиты от перенапряжений (разрядников, варисторов и т.п.) на платах или внутри блоков выпрямителя, является не правильной с нашей точки зрения. Существующий опыт показывает, что эти варисторы как правило рассчитаны на токи 7 – 10 кА (форма импульса 8/20 мкС) и по своим параметрам соответствуют третьему классу защиты согласно ГОСТ Р 51992-2002( МЭК 61643-1-98). Как правило, эксплуатирующие организации считают данный тип защиты достаточным и никаких дополнительных мер для повышения надежности работы оборудования не принимают. Однако, при отсутствии дополнительных внешних устройств защиты от импульсных перенапряжений более высокого класса, а так же при возникновении длительных превышений рабочего напряжения питающей сети в данной ситуации возможно возникновение двух типовых аварийных ситуаций:
a) Токи значительных величин, возникающие при срабатывании установленных внутри модуля варисторов, будут протекать по печатным проводникам плат или проводам внутри блоков выпрямителя по кратчайшему пути к заземляющей клемме стойки. Это может вызвать выгорание печатных проводников на платах и возникновению на параллельных незащищенных цепях наводок, которые в свою очередь приведут к выходу из строя электронных элементов блока выпрямителя. При превышении максимальных импульсных токов, определенных для данного варистора изготовителем, возможно, его возгорание и даже разрушение, что может привести к пожару и механическому повреждению самого выпрямителя (более подробно описано в п.п. 2.1).
b) Несколько другая ситуация возникает в случае длительного установившегося превышения действующего напряжения в сети над максимальным допустимым рабочим напряжением Uc, определенным ТУ для данного варистора (как правило используются варисторы с Uc = 275 В). Подробно данная ситуация была описана выше (см п.п. 2.2). В результате описанного воздействия появляется вероятность возгорания печатных плат и внутренней проводки, а так же возникновения механических повреждений (при взрыве варистора), что подтверждается статистикой организаций, осуществляющих ремонт выпрямителей.
Пример таких повреждений показан на рисунке 6.
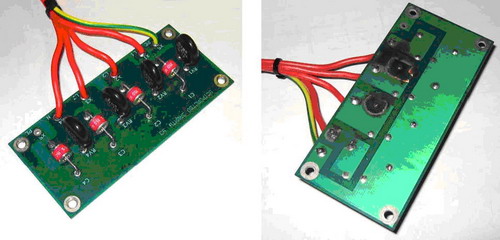
Рис.6
С точки зрения решения проблем описанных в пункте (а), наиболее правильным является вариант установки защитных устройств, при котором они размещаются в отдельном защитном щитке или в штатных силовых и распределительных щитах электроустановки объекта. Применение внешних дополнительных устройств защиты позволяет защитить выпрямитель от импульсных перенапряжений величиной в сотни киловольт и соответственно снизить до допустимого (7 – 10 кА) значения величины импульсных токов, которые будут протекать через варисторы, встроенные в выпрямитель, или практически полностью исключить их.
Для защиты оборудования от длительного установившегося превышения действующего напряжения в сети (пункт b) можно использовать устройства контроля напряжения фазы или подобные им (см. рис. 7).
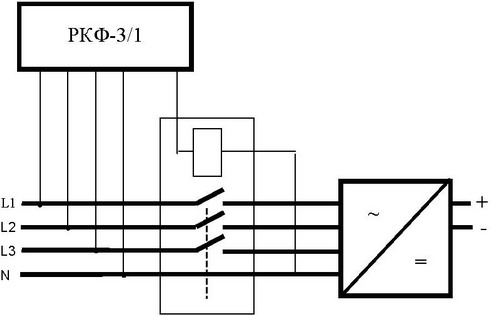
Рис. 7 Подключение устройства контроля фаз РКФ-3/1
[ http://www.energo-montage.ru/pages/top/articles/osobennosti_ekspluatacii_uzip/index_76.html]
Тематики
Синонимы
EN
3.1.45 устройство защиты от импульсных перенапряжений (surge protective device); SPD: Устройство, предназначенное для ограничения перенапряжения и скачков напряжения; устройство содержит, по крайней мере, один нелинейный компонент.
Источник: ГОСТ Р МЭК 62305-2-2010: Менеджмент риска. Защита от молнии. Часть 2. Оценка риска оригинал документа
3.53 устройство защиты от импульсных перенапряжений (surge protective device); SPD: Устройство, предназначенное для ограничения перенапряжения и скачков напряжения; устройство содержит по крайней мере один нелинейный компонент.
Источник: ГОСТ Р МЭК 62305-1-2010: Менеджмент риска. Защита от молнии. Часть 1. Общие принципы оригинал документа
3.33 устройство защиты от импульсных перенапряжений (surge protection device, SPD): Устройство, предназначенное для подавления кондуктивных перенапряжений и импульсных токов в линиях.
Источник: ГОСТ Р 51317.1.5-2009: Совместимость технических средств электромагнитная. Воздействия электромагнитные большой мощности на системы гражданского назначения. Основные положения оригинал документа
Русско-английский словарь нормативно-технической терминологии > устройство защиты от импульсных перенапряжений
6 технология коммутации
технология коммутации
-
[Интент]Современные технологии коммутации
[ http://www.xnets.ru/plugins/content/content.php?content.84]Статья подготовлена на основании материалов опубликованных в журналах "LAN", "Сети и системы связи", в книге В.Олифер и Н.Олифер "Новые технологии и оборудование IP-сетей", на сайтах www.citforum.ru и опубликована в журнале "Компьютерные решения" NN4-6 за 2000 год.
- Введение
- Коммутация первого уровня.
- Коммутация второго уровня.
- Коммутация третьего уровня.
- Коммутация четвертого уровня.
- Критерии выбора оборудования, физическая и логическая структура сети
- Качество обслуживания (QoS) и принципы задания приоритетов
- Заключение
Введение
На сегодня практически все организации, имеющие локальные сети, остановили свой выбор на сетях типа Ethernet. Данный выбор оправдан тем, что начало внедрения такой сети сопряжено с низкой стоимостью и простотой реализации, а развитие - с хорошей масштабируемостью и экономичностью.
Бросив взгляд назад - увидим, что развитие активного оборудования сетей шло в соответствии с требованиями к полосе пропускания и надежности. Требования, предъявляемые к большей надежности, привели к отказу от применения в качестве среды передачи коаксиального кабеля и перевода сетей на витую пару. В результате такого перехода отказ работы соединения между одной из рабочих станций и концентратором перестал сказываться на работе других рабочих станций сети. Но увеличения производительности данный переход не принес, так как концентраторы используют разделяемую (на всех пользователей в сегменте) полосу пропускания. По сути, изменилась только физическая топология сети - с общей шины на звезду, а логическая топология по-прежнему осталась - общей шиной.
Дальнейшее развитие сетей шло по нескольким путям:- увеличение скорости,
- внедрение сегментирования на основе коммутации,
- объединение сетей при помощи маршрутизации.
Увеличение скорости при прежней логической топологии - общая шина, привело к незначительному росту производительности в случае большого числа портов.
Большую эффективность в работе сети принесло сегментирование сетей с использованием технология коммутации пакетов. Коммутация наиболее действенна в следующих вариантах:
Вариант 1, именуемый связью "многие со многими" – это одноранговые сети, когда одновременно существуют потоки данных между парами рабочих станций. При этом предпочтительнее иметь коммутатор, у которого все порты имеют одинаковую скорость, (см. Рисунок 1).
Вариант 2, именуемый связью "один со многими" – это сети клиент-сервер, когда все рабочие станции работают с файлами или базой данных сервера. В данном случае предпочтительнее иметь коммутатор, у которого порты для подключения рабочих станций имеют одинаковую небольшую скорость, а порт, к которому подключается сервер, имеет большую скорость,(см. Рисунок 2).

Когда компании начали связывать разрозненные системы друг с другом, маршрутизация обеспечивала максимально возможную целостность и надежность передачи трафика из одной сети в другую. Но с ростом размера и сложности сети, а также в связи со все более широким применением коммутаторов в локальных сетях, базовые маршрутизаторы (зачастую они получали все данные, посылаемые коммутаторами) стали с трудом справляться со своими задачами.
Проблемы с трафиком, связанные с маршрутизацией, проявляются наиболее остро в средних и крупных компаниях, а также в деятельности операторов Internet, так как они вынуждены иметь дело с большими объемами IP-трафика, причем этот трафик должен передаваться своевременно и эффективно.
С подключением настольных систем непосредственно к коммутаторам на 10/100 Мбит/с между ними и магистралью оказывается все меньше промежуточных устройств. Чем выше скорость подключения настольных систем, тем более скоростной должна быть магистраль. Кроме того, на каждом уровне устройства должны справляться с приходящим трафиком, иначе возникновения заторов не избежать.
Рассмотрению технологий коммутации и посвящена данная статья.Коммутация первого уровня
Термин "коммутация первого уровня" в современной технической литературе практически не описывается. Для начала дадим определение, с какими характеристиками имеет дело физический или первый уровень модели OSI:
физический уровень определяет электротехнические, механические, процедурные и функциональные характеристики активации, поддержания и дезактивации физического канала между конечными системами. Спецификации физического уровня определяют такие характеристики, как уровни напряжений, синхронизацию изменения напряжений, скорость передачи физической информации, максимальные расстояния передачи информации, физические соединители и другие аналогичные характеристики.
Смысл коммутации на первом уровне модели OSI означает физическое (по названию уровня) соединение. Из примеров коммутации первого уровня можно привести релейные коммутаторы некоторых старых телефонных и селекторных систем. В более новых телефонных системах коммутация первого уровня применяется совместно с различными способами сигнализации вызовов и усиления сигналов. В сетях передачи данных данная технология применяется в полностью оптических коммутаторах.Коммутация второго уровня
Рассматривая свойства второго уровня модели OSI и его классическое определение, увидим, что данному уровню принадлежит основная доля коммутирующих свойств.
Определение. Канальный уровень (формально называемый информационно-канальным уровнем) обеспечивает надежный транзит данных через физический канал. Канальный уровень решает вопросы физической адресации (в противоположность сетевой или логической адресации), топологии сети, линейной дисциплины (каким образом конечной системе использовать сетевой канал), уведомления о неисправностях, упорядоченной доставки блоков данных и управления потоком информации.
На самом деле, определяемая канальным уровнем модели OSI функциональность служит платформой для некоторых из сегодняшних наиболее эффективных технологий. Большое значение функциональности второго уровня подчеркивает тот факт, что производители оборудования продолжают вкладывать значительные средства в разработку устройств с такими функциями.
С технологической точки зрения, коммутатор локальных сетей представляет собой устройство, основное назначение которого - максимальное ускорение передачи данных за счет параллельно существующих потоков между узлами сети. В этом - его главное отличие от других традиционных устройств локальных сетей – концентраторов (Hub), предоставляющих всем потокам данных сети всего один канал передачи данных.
Коммутатор позволяет передавать параллельно несколько потоков данных c максимально возможной для каждого потока скоростью. Эта скорость ограничена физической спецификацией протокола, которую также часто называют "скоростью провода". Это возможно благодаря наличию в коммутаторе большого числа центров обработки и продвижения кадров и шин передачи данных.
Коммутаторы локальных сетей в своем основном варианте, ставшем классическим уже с начала 90-х годов, работают на втором уровне модели OSI, применяя свою высокопроизводительную параллельную архитектуру для продвижения кадров канальных протоколов. Другими словами, ими выполняются алгоритмы работы моста, описанные в стандартах IEEE 802.1D и 802.1H. Также они имеют и много других дополнительных функций, часть которых вошла в новую редакцию стандарта 802.1D-1998, а часть остается пока не стандартизованной.
Коммутаторы ЛВС отличаются большим разнообразием возможностей и, следовательно, цен - стоимость 1 порта колеблется в диапазоне от 50 до 1000 долларов. Одной из причин столь больших различий является то, что они предназначены для решения различных классов задач. Коммутаторы высокого класса должны обеспечивать высокую производительность и плотность портов, а также поддерживать широкий спектр функций управления. Простые и дешевые коммутаторы имеют обычно небольшое число портов и не способны поддерживать функции управления. Одним из основных различий является используемая в коммутаторе архитектура. Поскольку большинство современных коммутаторов работают на основе патентованных контроллеров ASIC, устройство этих микросхем и их интеграция с остальными модулями коммутатора (включая буферы ввода-вывода) играет важнейшую роль. Контроллеры ASIC для коммутаторов ЛВС делятся на 2 класса - большие ASIC, способные обслуживать множество коммутируемых портов (один контроллер на устройство) и небольшие ASIC, обслуживающие по несколько портов и объединяемые в матрицы коммутации.
Существует 3 варианта архитектуры коммутаторов:
- переключение (cross-bar) с буферизацией на входе,
- самомаршрутизация (self-route) с разделяемой памятью
- высокоскоростная шина.
На рисунке 3 показана блок-схема коммутатора с архитектурой, используемой для поочередного соединения пар портов. В любой момент такой коммутатор может обеспечить организацию только одного соединения (пара портов). При невысоком уровне трафика не требуется хранение данных в памяти перед отправкой в порт назначения - такой вариант называется коммутацией на лету cut-through. Однако, коммутаторы cross-bar требуют буферизации на входе от каждого порта, поскольку в случае использования единственно возможного соединения коммутатор блокируется (рисунок 4). Несмотря на малую стоимость и высокую скорость продвижения на рынок, коммутаторы класса cross-bar слишком примитивны для эффективной трансляции между низкоскоростными интерфейсами Ethernet или token ring и высокоскоростными портами ATM и FDDI.


Коммутаторы с разделяемой памятью имеют общий входной буфер для всех портов, используемый как внутренняя магистраль устройства (backplane). Буферизагия данных перед их рассылкой (store-and-forward - сохранить и переслать) приводит к возникновению задержки. Однако, коммутаторы с разделяемой памятью, как показано на рисунке 5 не требуют организации специальной внутренней магистрали для передачи данных между портами, что обеспечивает им более низкую цену по сравнению с коммутаторами на базе высокоскоростной внутренней шины.

На рисунке 6 показана блок-схема коммутатора с высокоскоростной шиной, связывающей контроллеры ASIC. После того, как данные преобразуются в приемлемый для передачи по шине формат, они помещаются на шину и далее передаются в порт назначения. Поскольку шина может обеспечивать одновременную (паралельную) передачу потока данных от всех портов, такие коммутаторы часто называют "неблокируемыми" (non-blocking) - они не создают пробок на пути передачи данных.

Применение аналогичной параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня модели OSI.
Коммутация третьего уровня
В продолжении темы о технологиях коммутации рассмотренных в предыдущем номера повторим, что применение параллельной архитектуры для продвижения пакетов сетевых протоколов привело к появлению коммутаторов третьего уровня. Это позволило существенно, в 10-100 раз повысить скорость маршрутизации по сравнению с традиционными маршрутизаторами, в которых один центральный универсальный процессор выполняет программное обеспечение маршрутизации.
По определению Сетевой уровень (третий) - это комплексный уровень, который обеспечивает возможность соединения и выбор маршрута между двумя конечными системами, подключенными к разным "подсетям", которые могут находиться в разных географических пунктах. В данном случае "подсеть" это, по сути, независимый сетевой кабель (иногда называемый сегментом).
Коммутация на третьем уровне - это аппаратная маршрутизация. Традиционные маршрутизаторы реализуют свои функции с помощью программно-управляемых процессоров, что будем называть программной маршрутизацией. Традиционные маршрутизаторы обычно продвигают пакеты со скоростью около 500000 пакетов в секунду. Коммутаторы третьего уровня сегодня работают со скоростью до 50 миллионов пакетов в секунду. Возможно и дальнейшее ее повышение, так как каждый интерфейсный модуль, как и в коммутаторе второго уровня, оснащен собственным процессором продвижения пакетов на основе ASIC. Так что наращивание количества модулей ведет к наращиванию производительности маршрутизации. Использование высокоскоростной технологии больших заказных интегральных схем (ASIC) является главной характеристикой, отличающей коммутаторы третьего уровня от традиционных маршрутизаторов. Коммутаторы 3-го уровня делятся на две категории: пакетные (Packet-by-Packet Layer 3 Switches, PPL3) и сквозные (Cut-Through Layer 3 Switches, CTL3). PPL3 - означает просто быструю маршрутизацию (Рисунок_7). CTL3 – маршрутизацию первого пакета и коммутацию всех остальных (Рисунок 8).

У коммутатора третьего уровня, кроме реализации функций маршрутизации в специализированных интегральных схемах, имеется несколько особенностей, отличающих их от традиционных маршрутизаторов. Эти особенности отражают ориентацию коммутаторов 3-го уровня на работу, в основном, в локальных сетях, а также последствия совмещения в одном устройстве коммутации на 2-м и 3-м уровнях:
- поддержка интерфейсов и протоколов, применяемых в локальных сетях,
- усеченные функции маршрутизации,
- обязательная поддержка механизма виртуальных сетей,
- тесная интеграция функций коммутации и маршрутизации, наличие удобных для администратора операций по заданию маршрутизации между виртуальными сетями.
Наиболее "коммутаторная" версия высокоскоростной маршрутизации выглядит следующим образом (рисунок 9). Пусть коммутатор третьего уровня построен так, что в нем имеется информация о соответствии сетевых адресов (например, IP-адресов) адресам физического уровня (например, MAC-адресам) Все эти МАС-адреса обычным образом отображены в коммутационной таблице, независимо от того, принадлежат ли они данной сети или другим сетям.

Первый коммутатор, на который поступает пакет, частично выполняет функции маршрутизатора, а именно, функции фильтрации, обеспечивающие безопасность. Он решает, пропускать или нет данный пакет в другую сеть Если пакет пропускать нужно, то коммутатор по IP-адресу назначения определяет МАС-адрес узла назначения и формирует новый заголовок второго уровня с найденным МАС-адресом. Затем выполняется обычная процедура коммутации по данному МАС-адресу с просмотром адресной таблицы коммутатора. Все последующие коммутаторы, построенные по этому же принципу, обрабатывают данный кадр как обычные коммутаторы второго уровня, не привлекая функций маршрутизации, что значительно ускоряет его обработку. Однако функции маршрутизации не являются для них избыточными, поскольку и на эти коммутаторы могут поступать первичные пакеты (непосредственно от рабочих станций), для которых необходимо выполнять фильтрацию и подстановку МАС-адресов.
Это описание носит схематический характер и не раскрывает способов решения возникающих при этом многочисленных проблем, например, проблемы построения таблицы соответствия IP-адресов и МАС-адресов
Примерами коммутаторов третьего уровня, работающих по этой схеме, являются коммутаторы SmartSwitch компании Cabletron. Компания Cabletron реализовала в них свой протокол ускоренной маршрутизации SecureFast Virtual Network, SFVN.
Для организации непосредственного взаимодействия рабочих станций без промежуточного маршрутизатора необходимо сконфигурировать каждую из них так, чтобы она считала собственный интерфейс маршрутизатором по умолчанию. При такой конфигурации станция пытается самостоятельно отправить любой пакет конечному узлу, даже если этот узел находится в другой сети. Так как в общем случае (см. рисунок 10) станции неизвестен МАС-адрес узла назначения, то она генерирует соответствующий ARP-запрос, который перехватывает коммутатор, поддерживающий протокол SFVN. В сети предполагается наличие сервера SFVN Server, являющегося полноценным маршрутизатором и поддерживающего общую ARP-таблицу всех узлов SFVN-сети. Сервер возвращает коммутатору МАС-адрес узла назначения, а коммутатор, в свою очередь, передает его исходной станции. Одновременно сервер SFVN передает коммутаторам сети инструкции о разрешении прохождения пакета с МАС-адресом узла назначения через границы виртуальных сетей. Затем исходная станция передает пакет в кадре, содержащем МАС-адрес узла назначения. Этот кадр проходит через коммутаторы, не вызывая обращения к их блокам маршрутизации. Отличие протокола SFVN компании Cabletron от - описанной выше общей схемы в том, что для нахождения МАС-адреса по IP-адресу в сети используется выделенный сервер.
Протокол Fast IP компании 3Com является еще одним примером реализации подхода с отображением IP-адреса на МАС-адрес. В этом протоколе основными действующими лицами являются сетевые адаптеры (что не удивительно, так как компания 3Com является признанным лидером в производстве сетевых адаптеров Ethernet) С одной стороны, такой подход требует изменения программного обеспечения драйверов сетевых адаптеров, и это минус Но зато не требуется изменять все остальное сетевое оборудование.
При необходимости передать пакет узлу назначения другой сети, исходный узел в соответствии с технологией Fast IP должен передать запрос по протоколу NHRP (Next Hop Routing Protocol) маршрутизатору сети. Маршрутизатор переправляет этот запрос узлу назначения, как обычный пакет Узел назначения, который также поддерживает Fast IP и NHRP, получив запрос, отвечает кадром, отсылаемым уже не маршрутизатору, а непосредственно узлу-источнику (по его МАС-адресу, содержащемуся в NHRP-запросе). После этого обмен идет на канальном уровне на основе известных МАС-адресов. Таким образом, снова маршрутизировался только первый пакет потока (как на рисунке 9 кратковременный поток), а все остальные коммутировались (как на рисунке 9 долговременный поток).
Еще один тип коммутаторов третьего уровня — это коммутаторы, работающие с протоколами локальных сетей типа Ethernet и FDDI. Эти коммутаторы выполняют функции маршрутизации не так, как классические маршрутизаторы. Они маршрутизируют не отдельные пакеты, а потоки пакетов.
Поток — это последовательность пакетов, имеющих некоторые общие свойства. По меньшей мере, у них должны совпадать адрес отправителя и адрес получателя, и тогда их можно отправлять по одному и тому же маршруту. Если классический способ маршрутизации использовать только для первого пакета потока, а все остальные обрабатывать на основании опыта первого (или нескольких первых) пакетов, то можно значительно ускорить маршрутизацию всего потока.
Рассмотрим этот подход на примере технологии NetFlow компании Cisco, реализованной в ее маршрутизаторах и коммутаторах. Для каждого пакета, поступающего на порт маршрутизатора, вычисляется хэш-функция от IP-адресов источника, назначения, портов UDP или TCP и поля TOS, характеризующего требуемое качество обслуживания. Во всех маршрутизаторах, поддерживающих данную технологию, через которые проходит данный пакет, в кэш-памяти портов запоминается соответствие значения хэш-функции и адресной информации, необходимой для быстрой передачи пакета следующему маршрутизатору. Таким образом, образуется квазивиртуальный канал (см. Рисунок 11), который позволяет быстро передавать по сети маршрутизаторов все последующие пакеты этого потока. При этом ускорение достигается за счет упрощения процедуры обработки пакета маршрутизатором - не просматриваются таблицы маршрутизации, не выполняются ARP-запросы.
Этот прием может использоваться в маршрутизаторах, вообще не поддерживающих коммутацию, а может быть перенесен в коммутаторы. В этом случае такие коммутаторы тоже называют коммутаторами третьего уровня. Примеров маршрутизаторов, использующих данный подход, являются маршрутизаторы Cisco 7500, а коммутаторов третьего уровня — коммутаторы Catalyst 5000 и 5500. Коммутаторы Catalyst выполняют усеченные функции описанной схемы, они не могут обрабатывать первые пакеты потоков и создавать новые записи о хэш-функциях и адресной информации потоков. Они просто получают данную информацию от маршрутизаторов 7500 и обрабатывают пакеты уже распознанных маршрутизаторами потоков.
Выше был рассмотрен способ ускоренной маршрутизации, основанный на концепции потока. Его сущность заключается в создании квазивиртуальных каналов в сетях, которые не поддерживают виртуальные каналы в обычном понимании этого термина, то есть сетях Ethernet, FDDI, Token Ring и т п. Следует отличать этот способ от способа ускоренной работы маршрутизаторов в сетях, поддерживающих технологию виртуальных каналов — АТМ, frame relay, X 25. В таких сетях создание виртуального канала является штатным режимом работы сетевых устройств. Виртуальные каналы создаются между двумя конечными точками, причем для потоков данных, требующих разного качества обслуживания (например, для данных разных приложений) может создаваться отдельный виртуальный канал. Хотя время создания виртуального канала существенно превышает время маршрутизации одного пакета, выигрыш достигается за счет последующей быстрой передачи потока данных по виртуальному каналу. Но в таких сетях возникает другая проблема — неэффективная передача коротких потоков, то есть потоков, состоящих из небольшого количества пакетов (классический пример — пакеты протокола DNS).
Накладные расходы, связанные с созданием виртуального канала, приходящиеся на один пакет, снижаются при передаче объемных потоков данных. Однако они становятся неприемлемо высокими при передаче коротких потоков. Для того чтобы эффективно передавать короткие потоки, предлагается следующий вариант, при передаче нескольких первых пакетов выполняется обычная маршрутизация. Затем, после того как распознается устойчивый поток, для него строится виртуальный канал, и дальнейшая передача данных происходит с высокой скоростью по этому виртуальному каналу. Таким образом, для коротких потоков виртуальный канал вообще не создается, что и повышает эффективность передачи.
По такой схеме работает ставшая уже классической технология IP Switching компании Ipsilon. Для того чтобы сети коммутаторов АТМ передавали бы пакеты коротких потоков без установления виртуального канала, компания Ipsilon предложила встроить во все коммутаторы АТМ блоки IP-маршрутизации (рисунок 12), строящие обычные таблицы маршрутизации по обычным протоколам RIP и OSPF.
Компания Cisco Systems выдвинула в качестве альтернативы технологии IP Switching свою собственную технологию Tag Switching, но она не стала стандартной. В настоящее время IETF работает над стандартным протоколом обмена метками MPLS (Multi-Protocol Label Switching), который обобщает предложение компаний Ipsilon и Cisco, а также вносит некоторые новые детали и механизмы. Этот протокол ориентирован на поддержку качества обслуживания для виртуальных каналов, образованных метками.
Коммутация четвертого уровня
Свойства четвертого или транспортного уровня модели OSI следующие: транспортный уровень обеспечивает услуги по транспортировке данных. В частности, заботой транспортного уровня является решение таких вопросов, как выполнение надежной транспортировки данных через объединенную сеть. Предоставляя надежные услуги, транспортный уровень обеспечивает механизмы для установки, поддержания и упорядоченного завершения действия виртуальных каналов, систем обнаружения и устранения неисправностей транспортировки и управления информационным потоком (с целью предотвращения переполнения данными из другой системы).
Некоторые производители заявляют, что их системы могут работать на втором, третьем и даже четвертом уровнях. Однако рассмотрение описания стека TCP/IP (рисунок 1), а также структуры пакетов IP и TCP (рисунки 2, 3), показывает, что коммутация четвертого уровня является фикцией, так как все относящиеся к коммутации функции осуществляются на уровне не выше третьего. А именно, термин коммутация четвертого уровня с точки зрения описания стека TCP/IP противоречий не имеет, за исключением того, что при коммутации должны указываться адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя. Пакеты TCP имеют поля локальный порт отправителя и локальный порт получателя (рисунок 3), несущие смысл точек входа в приложение (в программу), например Telnet с одной стороны, и точки входа (в данном контексте инкапсуляции) в уровень IP. Кроме того, в стеке TCP/IP именно уровень TCP занимается формированием пакетов из потока данных идущих от приложения. Пакеты IP (рисунок 2) имеют поля адреса компьютера (маршрутизатора) источника и компьютера (маршрутизатора) получателя и следовательно могут наряду с MAC адресами использоваться для коммутации. Тем не менее, название прижилось, к тому же практика показывает, что способность системы анализировать информацию прикладного уровня может оказаться полезной — в частности для управления трафиком. Таким образом, термин "зависимый от приложения" более точно отражает функции так называемых коммутаторов четвертого уровня.


Тематики
EN
Русско-английский словарь нормативно-технической терминологии > технология коммутации
7 термофильные микроорганизмы
= термофилы[лат. therme — тепло и phileo — люблю; греч. mikros — маленький и лат. organismus — живое тело, живое существо]микроорганизмы, нормально существующие и размножающиеся при температуре выше 45 °С (гибельной для большинства живых существ). К Т.м. относятся также некоторые беспозвоночные (черви, насекомые, моллюски) и растения. Различают 4 подгруппы Т.м.: а) термотолерантные виды, которые растут в пределах от 10 до 55—60 °С, оптимальная область лежит при 35—40 °С; основное их отличие от мезофилов — способность расти при повышенных температурах, хотя оптимальные температуры роста для обеих групп находятся на одном уровне; б) факультативные Т.м., имеющие максимальную температуру роста между 50 и 65 °С, но способные также к размножению при комнатной температуре (20 °С); оптимум приходится на область температур, близких к верхней границе роста; в) облигатные Т.м., способные расти при температурах около 70 °С и не растущие ниже 40 °С (Bacillus acidocaldarius, Synechococcus lividus, архебактерии Methanobacterium thermoautotrophicum, Thermoplasma acidophilum и др.); оптимальная температурная область этих микроорганизмов примыкает к их верхней температурной границе роста; г) экстремальные Т.м., для которых характерны следующие температурные параметры: оптимум в области 80—105 °С, минимальная граница роста 60 °С и выше, максимальная — до 110 °С (архебактерии родов Thermoproteus, Pyrococcus, Pyrodictium и др.). Верхний температурный предел, при котором зафиксирован рост в виде чистой бактериальной культуры в лаборатории, составляет 110 °С; он обнаружен у архебактерии Pyrodictium occultum, растущей в диапазоне от 82 до 110 °С с оптимумом при 105 °С. Среди Т.м., относящихся к этим подгруппам, найдены фотосинтезирующие, хемолитотрофные и хемогетеротрофные бактерии. Есть среди них облигатные аэробы (см. аэробы) и анаэробы (см. анаэробы). Обитают в геотермальных источниках, верхних слоях почвы, прогреваемых солнцем, в самонагревающихся субстратах (навоз, торф, зерно). Некоторые Т.м. используют для получения термофильных ферментов, применяемых в генной инженерии (напр., Taq-полимеразы, лигазы, щелочные фосфатазы).Толковый биотехнологический словарь. Русско-английский. > термофильные микроорганизмы
8 использоваться
be useful, be used (up), be utilized, be in service in• В основном он используется в/ при... - It is principally used in...• В случае, когда используются такие соглашения, предполагается, что... - When such terms are used, it is assumed that...• Данная методика будет использоваться в последующих главах. - This procedure will be followed in subsequent chapters.• Данный метод весьма общий, он может использоваться для того, чтобы... - The method is quite general and can be used to deal with...• Для очень тонких работ обычно используется серебро, потому что... - For very accurate work, silver is usually used because...• Итак, мы намечаем несколько методов, которые могут использоваться, чтобы... - We therefore outline some procedures which can be used to...• Какая бы техника ни использовалась, в основном всегда будет... - Whichever technique is used, there will generally be...• Мы увидим, что эти методы могут использоваться лишь тогда, когда... - It will be observed that these methods are only applicable when...• На самом деле оба метода используются на практике. - Both methods are in fact used in practice.• Обнаружилось, что данный метод успешно используется в широком диапазоне... - The method is found to be successful on a wide range of...• Одна простая теория может использоваться для... - A simple theory can be used to...• Подобная техника используется для... - A similar technique is used for...• Подобное соглашение используется, когда... - A similar convention is used when...• Подобные методы могут использоваться в более сложных ситуациях. - Similar methods may be employed in more complicated cases.• Поэтому это долго использовалось для... - For these reasons, it has long been used for...• Следует подчеркнуть, что этот метод должен использоваться только если... - It is to be emphasized that this method should be used only if...• Следующие утверждения часто используются для того, чтобы определить... - The following propositions are often used to determine...• Схема, которую мы будем использовать, идентична той, что использовалась для... - The scheme we will use is identical to that used for...• То, что было сказано выше, применяется в частности... - What has been said above applies in particular to...• Уравнение (4) часто используется как базис для вычислений... - Equation (4) is often used as a basis for the calculation of...• Чрезвычайно похожие идеи используются в... - Precisely similar ideas are applicable to...• Эта книга может использоваться для разработки... - This book can be used to design...• Эта терминология использовалась рядом авторов. - This terminology has been used by a number of writers.• Это устройство может использоваться каждый раз, когда... - This device can be employed whenever...9 cue-reversal point
точка поворота сигнала (точка в диапазоне от 0 до 1 мсек, ниже которой увеличение интерауральной задержки заставляет бинауральный образ сдвигаться вбок. Выше этой точки увеличение задержки вызывает возвращение к центру)Англо-русский словарь промышленной и научной лексики > cue-reversal point
10 скорость
speed
в механике - одна из основных характеристик движения материальной точки. — rate of motion. speed and velocity are often used interchangeably although some authorities maintain that velocity should be used only for the vector quantity.
- (вектор) (рис.124) — velocity (vel)
величина скорости в данном направлении, — а vector quantity equal to speed in a given direction.
- (темп изменения величины) — rate
- аварийного слива топлива (в воздухе) — fuel dumping /jettison/ rate. jettison rate for all tanks and all boost pumps operating is... kg per minute.
- аварийного слива топлива (производительность слива) порядка 2000 л/мин — fuel dump rate of 2000 liters per minute
- азимутальной коррекции (гироскопа) — azimuth erection rate
-, безопасная — safety speed
- бокового движения (вертолета) — sideward flight speed
- бокового перемещения (скольжения) — lateral velocity
скорость относительно невозмущенного воздуха в направлении поперечной оси. — the velocity relative to the undisturbed air in the direction of the lateral axis.
-, большая — high speed
-, большая (стеклоочистителя) — fast rate (fast)
"- велика" (надпись на указателе отклонения от заданной скорости прибора пкп) — fast
-, вертикальная — vertical speed
- вертикальная (для ссос) — descent /sink/ rate
-, вертикальная (при посадке) — descent velocity
with а limit descent velocity of... f.p.s. at the design landing weight...
- ветра (величина) — wind speed (ws)
скорость массы воздуха в горизонтальном направлении. — ws is horizontal velocity of а mass of air.
- ветра (величина и направление) (рис.124) — wind velocity
фактическая скорость ветра на высоте 50 фт. по сообщению) диспетчера. зафиксировать скорость и направление ветра. — the actual wind velocity at 50 foot height reported from the tower. record wind velocity and direction.
- ветра (название шкалы на графике) — wind
- ветра (сообщаемая диспетчерским пунктом или по метеосводке) — reported wind (speed)
- в зависимости от высоты и веса, вертикальная — vertical speed for altitude and weight
- взлета, безопасная (v2) — takeoff safety speed (v2)
скорость, достигаемая на первом этапе взлета, и выбираемая таким образом, чтобы обеспечить безопасное получение нормируемых градиентов набора высоты на втором этапе взлета. — the scheduled target speed to be attained at the 35 feet height with one engine inoperative.
- взлета, минимальная безопасная (v2 min) — minimum takeoff safety speed (v2 min)
наименьшая допустимая скорость на 1-м этапе взлета.
- взлета, минимально эволютивная (vmin эв) — air minimum control speed (v мса)
- в зоне ожидания — holding speed
- в момент отказа критического двигателя (при взлете) — critical engine failure speed (v1)
- в момент принятия решения (при взлете) — decision speed (v1)
-, воздушная — airspeed
скорость полета ла относительно воздуха, независимо от пути, пройденного относительно земной поверхности, — the rate of speed at which an aircraft is traveling through the atmosphere (air), and is independent of any distance covered on the surface of the earth.
- возникновения бафтинга — buffet (onset) speed
- возникновения бафтинга, предшествующего срыву — pre-stall buffet speed
- возникновения предупреждающей тряски (vтp) — pre-stall warning speed
скорость, при которой возникают заметные естественные или искусственно созданные признаки близости сваливания.
- возникновения флаттера — flutter (onset) speed
- восстановления (гироскопа) большая — fast erection rate
- вращения — rotational speed (n, n)
оборотов за единицу времени. — revolutions per unit time.
- вращения земли, угловая — earth('s) angular velocity
- вращения колеса (напр., при взлете) — tire speed. ; maximum takeoff weight restricted by tire speed
- в точке принятия решения — decision speed
- в точке принятия решения (при отказе критического двигателя) — critical engine failure speed
- встречного ветра — headwind speed
- встречного ветра (название шкалы на графике) — headwind
- в условиях турбулентности — rough air speed (vra)
- входа в зону турбулентности, заданная — target (air)speed for turbulent air penetration
-, выбранная заявителем — speed selected by the applicant
- выпуска (или уборки) шасси, максимальная — landing gear operating speed (vlo)
максимальная скорость полета, при которой разрешается выпускать или убирать шасси. — maximum speed at which it is safe to extend or retract the landing gear.
- выхода (гидросамолета, са молета-амфибии) на редан — hump speed. the speed at which the water resistance of a seaplane or amphibian is hignest.
- газового потока (через двиг.) — gas flow velocity
- герметизации кабины — cabin pressurization rate
-, гиперзвуковая — hypersonic speed
скорости от м-5 и выше. — pertaining to speeds of mach 5 or greater.
- горизонтального полета — level flight speed, speed in level flight
- горизонтального полета на максимальном продолжительном режиме (двиг.), максимальная — maximum speed in level flight with maximum continuous power
- горизонтального полета на расчетном режиме работы двигателей, максимальная — maximum speed in level flight with rated rpm and power
- движения назад (вертолета) — rearward (flight) speed
-, демонстрационная — demonstrated speed
- дисс (доплеровского измерителя скорости и сноса) — doppler velocity
- для определения характеристик устойчивости, максимальная — maximum speed for stability characteristic (vfc)
- горизонтального полета на режиме максимальной продолжительной мощности (тяги) — maximum speed in level flight with maximum continuous power (or thrust) (vh)
-, дозвуковая — subsonic speed
-, докритическая — pre-stall speed
-, допустимая — allowable speed
-, допустимая (ограниченная) — limiting speed
-, заданная воздушная — target airspeed
- заданная подвижным индексом — bug speed. fuel dumping may be necessary to reduce the bug speed.
- заправки топливом — fueling rate, fuel delivery rate
- захода на посадку (vзп) — approach speed (vapp)
- захода на посадку при всех работающих двигателях — approach speed with all engines operating
- захода на посадку при одном неработающем двигателе — approach speed with one engine inoperative
- захода на посадку с убранными закрылками — no flap approach speed
- захода на посадку с убранными закрылками и предкрылками — no flap-no slat approach speed. аn approach speed of 15 knots below no flap-no slat approach speeds can be used.
- захода на посадку с убранными предкрылками — no slat approach speed. with the leading edge slats extended, an approach speed of 15 knots below no flap - no slat approach speeds can be used.
-, звуковая — sonic speed
скорость ла или его части. равная скорости звука в данных условиях. — the speed of sound. when an object travels in air at the same speed as that of sound in the same medium.
-, земная индикаторная (v13) (из) — calibrated airspeed (cas)
- изменения (величины) — rate (of change)
- изменения бокового отклонения — crosstrack (distance) deviation rate, xtk deviation rate
- изменения шага (винта) — pitch-change rate
-, индикаторная воздушная — equivalnet airspeed (eas)
-, индикаторная земная (v13, из) (сша) — calibrated airspeed (cas)
равна показанию указателя скорости (приборной скорости) с учетом аэродинамической поправки (и инструментальной погрешности). напр., 150 км/ч из. — airspeed indicator reading, as installed in airplane, corrected for (static source) position (and instrument) error. cas is equal to the tas in standard atmosphere at sea level.
-, индикаторная земная (англ.) — rectified air speed (ras). ras is the indicated airspeed corrected for instrument and position errors.
- истечения выходящих газов (из реактивного сопла газотурбинного двигателя) — exhaust velocity, speed of ехhaust gases. the velocity of gaseous or other particles (exhaust stream) that exhaust through the nozzle.
-, истинная воздушная (ис) — true airspeed (tas)
скорость самолета относительно невозмущенного воздуха, равная скорости. — the speed of the airplane relative to undisturbed air.
-, истинная воздушная (по числу m) — true mach number (m)
показания указателя числа м c учетом аэродинамической поправки для приемника статического давления. — machmeter reading corrected for static source position error.
- касания (при посадке) — touch-down speed
- коррекции гироскопа — gyro erection rate
- коррекции гироскопа в азимуте — gyro azimuth erection rate
- коррекции гироскопа по крену и тангажу — gyro roll/pitch erection rate
- крейсерская — cruising speed
скорость полета, не превышающая 90 % расчетной скорости горизонтального полета. — а speed not greater than 90 % of the design level speed.
-, крейсерская расчетная — design cruising speed (vc)
- крена, угловая — rate of roll, roll rate
-, критическая (сваливания) — stalling speed (vs)
-, линейная — linear velocity
скорость в заданном направлении для определения скорости. — speed acting in one specified direction defines velocity.
-, линейная (скорость движения no прямой) — linear speed. rate of motion in a straight iine.
-, максимальная допустимая эксплуатационная (no терминологии икао) — maximum permissible operating speed
-, максимальная маневренная — maneuvering speed (va)
нe допускать максимального отклонения поверхности управления при превышении максимальной маневренной скорости. — maximum deflection of flight controls should not be used above va.
-, максимальная посадочная (vп max) — maximum landing speed
-, максимальная предельнодопустимая — maximum operating limit speed
-, максимальная предельнодопустимая, приборная — maximum operating limit indicated airspeed (ias)
-, максимальная эксплуатационная — maximum operating limit speed (vmo)
- максимально допустимая (vмд) — maximum operating limit speed (vmo)
- максимальной продопжительности (полета) — high-endurance cruise speed
"- мала" (надпись на указателе отклонения от заданной скорости прибора пкп) — slow
-, малая — low speed
-, малая (стеклоочистителя) — slow rate (slow)
-, минимальная — minimum speed
наименьшая установившаяся скорость горизонтального полета на высоте, значительно превышающей размер крыла, при любом режиме работы двигателей, — the lowest steady speed which can be maintained by an airplane in level flight at an altitude large in comparison with the dimension of the wings, with any throttle setting.
-, минимальная (полетная) — minimum flying speed
наименьшая установившаяся скорость, выдерживаемая при любом режиме работы двигателей в горизонтальном полете на высоте, превышающей размах крыла, — the lowest steady speed that can be maintained with any throttle setting whatsoever, by an airplane in level flight at an altitude above the ground, greater than the span of the wing.
-, минимальная посадочная (vп min) — minimum landing speed
-, минимально эволютивная (vminэ) — minimum control speed (vmc)
скорость, при которой в случае отказа критического двигателя обеспечивается возможность управления самолетом для выдерживания прямолинейного полета на данной скорости, при нулевом рыскании и угле крена не более 5°. — vmc is the speed at which, when the critical engine is suddenly made inoperative at that speed, it is possible to recover control of the airplane with the engine still inoperative and to maintain it in straight flight at that speed, either with zero yaw or with an angle of bank not in excess of 5°.
-, минимально эволютивная (в воздухе) (vminэв) — air minimum control speed (vmca)
минимальная скорость полета, при которой обеспечивается управление самолетом с макс. креном до 5° в случае отказа критического двигателя и при работе остальных двигателей на взлетном режиме. — the minimum flight speed at which the airplane is controllable with а maximum of 5 deg. bank when the critical engine suddenly becomes inoperative with the remaining engines at take-off thrust.
-, минимально эволютивная (на земле) (vmin эр) — ground minimum control speed (vmcg)
минимальная скорость разбега, обеспечивающая продолжение взлета, с использеванием только аэродинамических поверхностей правления, в случае отказа критич. двиг. и при работе остальных двигателей на взлетном режиме. — the minimum speed on the ground at which the takeoff can be continued, utilizing aerodynamic controls alone, when the critical engine suddenly becomes inoperative with the remaining engines at takeoff thrust.
-, минимально эволютивная (при начальном наборе высоты) — minimum control speed (at takeoff climb)
-, минимально эволютивная (у земли) — minimum control speed near ground
-, минимально допустимая эксплуатационная — minimum operating speed
- набора высоты (вдоль траектории) — climb speed
- набора высоты (вертикальная) — rate of climb
при проверке летных характеристик - вертикальная составляющая возд. скор. в условиях станд. атмосферы. в обычном полете - скорость удаления от земной поверхности. — in performance testing, the vertical component of the air speed in standard atmosphere. in general flying, the rate of ascent from tfle earth.
- набора высоты на маршруте — enroute climb speed
- набора высоты, начальная — initial climb-out speed
- набора высоты с убранными закрылками — flaps up climb(ing) speed, no flap climb speed
- на высоте 15м, посадочная — landing reference speed (vref)
минимальная скорость на высоте 15м при нормальной посадке. — the minimum speed at the 50 foot height in a normal landing.
- нагрева — heating rate
- наибольшей дальности — best range cruise speed
- наибольшей продолжительности полета — high-endurance cruise speed
- наивыгоднейшего набора высоты — speed for best rate of climb (vy)
- наивыгоднейшего угла траектории набора высоты — speed for best angle of climb (vx)
- на маршруте — еп route speed
- на режиме максимальной дальности, крейсерская — long-range cruise speed
- на режиме наибольшей дальности — best range cruise speed
- на режиме наибольшей продолжительности — high-endurance cruise speed
- начала изменения положения механизации (при взлете,v3) — speed at start of extendable (high-lift) devices retraction (v3)
- начала подъема передней опоры (при взлете) — rotation speed (vr)
- начала торможения (vн.т.) — brake application speed, speed at start of (wheel) brakes application
- начального набора высоты — initial climb speed, climb-out speed
- начального набора высоты (v4) (в конце полной взлетной дистанции) — initial climb speed (v4)
- начального набора высоты, установившаяся — steady initial climb speed. take-off safety speed, v2, at 35 feet shall be consistent with achievement of smooth transition to steady initial climb speed, v4 at height of 400 feet.
- (максимальная), непревышаемая — never exceed speed (vne)
-, нормируемая — rated speed
- обнаружения (искомого) светила (звезды) телескопом (астрокорректора) — star-detection rate of telescope
- образования (напр., льда) — rate of (ice) formation
-, ограниченная заявителем — speed selected by the applicant
the approach and landing speeds must be selected by the applicant.
-, ограниченная энергоемкостью тормозов — maximum brake energy speed (vmbe)
максимальная скорость движения самолета по земле, при которой энергоемкость тормозов сможет обеспечить полную остановку самолета, — the maximum speed on the ground from which a stop can be accomplished within the energy capabilities of the brakes.
-, околозвуковая — transonic speed
скорость в диапазоне от м = 0,8 - 1,2. — speed in а range of mach 0.8 to 1.2.
-, окружная — circumferential speed
-, окружная (конца лопасти) — tip speed
-, окружная (тангенциальная, касательная) — radial velocity. doppler effect in terms of radial velocity of a target.
-, опасная (самолета, превышающая vмо/mмо) — aircraft overspeed (а/с ovsp). speed exceeding vmo/mmo
- определяется для гладкой, сухой впп с жестким покрытием — vi speed is based on smooth, dry, hard surfaced runways
-, оптимальная — best speed
- отказа критического двигателя (при взлете) — critical engine failure speed (v1)
скорость, при которой после обнаружения отказавшего двигателя, дистанция продолжительного взлета до высоты 10,7 м не превышает располагаемой дистанции взлета, или дистанция до полной остановки не превышает располагаемой дистанции прерванного взлета, — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- (сигнал) от доплеровской системы — doppler velocity
- от измерителя дисс (доплеровский измеритель путевой скорости и сноса), путевая — gappier ground speed (gsd)
- откачки (слива) топлива (на земле) — defueling rate, fuel off-loading rate
- отклонения закрылков — rate of the flaps motion
- отклонения от глиссады — glide slope deviation rate
- отклонения поверхности ynравления — control surface deflection rate
-, относительная — relative speed, speed of relative movement
motion of an aircraft relative to another.
- отработки (скорость изменения индикации прибора в зависимости от изменения параметра) — response rate /speed/, rate of response
- отработки астропоправки по курсу — rate /speed/ of response to celestial correction to azimuth e rror
- отработки поправки — correction response rate /speed/
- отработки сигнала — signal response rate
- отрыва (ла) — lirt-off speed (vlof:)
скорость в момент отрыва основных опорных устройств самолета от впп по окончании разбега при взлете (vотр.). — vlof is the speed at which the airplane first becomes airborne.
- отрыва колеса (характеристика тормозного колеса) — wheel unstick speed
-, отрыва, минимальная — minimum unstick speed (vmu)
устаназливается разработчиком (заявителем), как наименьшая скор, движения самолета на взлете, при которой еще можно производить отрыв самолета и затем продолжать взлет без применения особых методов пилотирования. — the speed selected by the applicant at and above which the airplane can be made to lift off the ground and сопtinue the take-off without displaying any hazardous characteristics.
- отрыва носового колеса (или передней стойки шасси) (vп.oп) — rotation speed (vr)
скорость начала преднамеренного увеличения угла тангажа при разбеге (рис. 113). — the speed at which the airplane rotation is initiated during the takeoff.
vr is the speed at which the nosewheel is raised and the airplane is rotated to the lift off attitude.
- отрыва передней опоры при взлете (vп.оп) — rotation speed
- перевода в набор высоты (после взлета) — initial climb speed
- перемещения органа управления — rate of control movement /displacement/
- пересечения входной кромки впп (vвк) — threshold speed (vt)
скорость самолета, с которой он пролетает над входной кромкой впп.
- пересечения входной кромки впп, демонстрационная — demonstrated threshold speed
- пересечения входной кромки впп, максимальная (vвк max.) — maximum threshold speed (vmt)
- пересечения входной кромки впп, намеченная (заданная) — target threshold speed (vtt). target threshold speed is the speed which the pilot aims to reach when the airplane crosses the threshold.
- пересечения входной кромки впп при нормальной работе всех двигателей (vвкn) — threshold speed with all еngines operating
- пересечения входной кромки впп при нормальной работе всех двигателей, намеченная (заданная) — target threshold speed with all engines operating
- пересечения входной кромки впп с двумя неработающими двигателями (vвк n-2) — threshold speed with two еngines inoperative
- пересечения входной кромки впп с одним неработающим двиг. (vвкn-1) — threshold speed with one еngine inoperative
- пересечения входной кромки впп с одним неработающим двигателем, намеченная (заданная) — target threshold speed with one engine inoperative
- пикирования — diving speed
- пикирования, демонстрационная — demonstrated flight diving speed (vdf)
-, пикирования, расчетная — design diving speed (vd)
- планирования — gliding speed
- планирования при заходе на посадку — gliding approach speed
- по азимуту, угловая — rate of turn
- поворота, угловая — rate of turn
- подъема передней опоры (стойки) шасси — rotation speed (vr)
скорость начала увеличения yгла тангажа на разбеге, преднамеренно создаваемого отклонением штурвала на себя для вывода самолета на взлетный угол атаки (vп.ст.). — the speed at which the airplane rotation is initiated during the takeoff, to lift /to rise/ the nose gear off the runway.
- поиска (искомой) звезды телескопом — (target) star detection rate of telescope
detection rate is the ratio of field of view to detection time.
-пo курсу, угловая — rate of turn
- полета — flight speed
- полета в болтанку — rough air speed (vra)
- полета в зоне ожидания — holding speed
- полета в неспокойном (турбулентном) воздухе — rough air speed (vra)
- полета для длительных режимов, наибольшая (vнэ) — normal operating limit speed (vno)
- полета, максимальная — maximum flying speed
- полета на наибольшую дальность крейсерская — best range cruise speed
- полета на наибольшую продолжительность — high-endurance cruise speed
- полета на режиме максимальной продолжительной мощности — speed (in flight) with maximum continuous power (or thrust)
- полета при болтанке — rough air speed (vra)
- полета с максимальной крейсерской тягой — speed (in flight) with maximum cruise /cruising/ thrust
-, пониженная — reduced (air) speed
при невозможности уборки створок реверса тяги продолжайте полет на пониженной скорости. — if reverser cannot be stowed, continue (flight) at reduced speed.
- по прибору (пр) — indicated airspeed (ias)
- попутного ветра — tailwind speed
- попутного ветра (название шкалы на графике) — tailwind
- порыва ветра — gust velocity
-, посадочная (vп) — landing speed
скорость самолета в момент касания основными его опорными устройствами поверхности впп — the minimum speed of an airplane at the instant of contact with the landing area in a normal landing.
-, посадочная (на высоте 15м) — landing reference speed (vref)
минимальная скорость на высоте 50 фт в условиях нормальной посадки, равная 1.3 скорости сваливания в посадочной конфигурации ла. — the minimum speed at 50 foot height in normal langin. equal to (1.3) times the stall speed in landing configuration.
-, постоянная — constant speed
-, поступательная (скорость движения вертолета вперед) — forward speed. steady angle of helicopter glide must be determined in autorotation, and with the optimum forward speed.
- по тангажу, угловая — rate of pitch
- потока газа (проходящего через двигатель, в фт/сек) — gas flow velocity (fps), vel f.p.s.
-, предельная (vпред.) — maximum operating limit speed (vmo)
скорость, преднамеренное превышение которой не допускается на всех режимах полета (набор высоты, крейсерский полет, снижение), кроме особо оговоренных случаев, допускаемых при летных испытаниях или тренировочных полетах. — speed that may not be deliberately exceeded in any regime of normal flight (climb, cruise or descent), unless а higher speed is authorized for flight test or pilot training operations.
-, предельно (свободно падающего тела) — terminal velocity
-, предельная (скорость самолета, превышающая допустимые ограничения vmo/mmo) — aircraft overspeed (а/с ovsp) а/с ovsp annunciator warns of exceeding air speed limitations (vmo/mmo)
-, предельно допустимая эксплуатационная (vпред.) — maximum operating limit speed (vmo)
- прецессии (гироскопа) — precession rate
- приближения (сближения) — closure rate
- приближения к земле (чрезмерная) — (excessive) closure rate to terrain, excessive rate of descent with respect to terrain
-,приборная воздушная (vпр) (пр) — indicated airspeed (ias)
показания указателя скорости, характеризующие величину скоростного напора, а не скорость перемещения самолета (напр.,150 км/ч пр). — airspeed indicator reading, as installed in the airplane, uncorrected for airspeed indicator system errors.
- приборная исправленная с учетом аэродинамической поправки и инструментальной погрешности прибора — calibrated airspeed (cas)
- при включении и выключении реверса тяги, максимальная — maximum speed for extending and retracting the thrust reverser, thrust reverser operating speed
- при включении стеклоочистителей лобовых стекол — windshield wiper operation speed
(т.е., скорость полета, при которой разрешается включать стеклоочистители) — do not operate the w/s wipers at speed in excess of... km/hr.
- при включении тормозов (при пробеге) — brake-on speed
- при выпуске воздушных тормозов — speed brake operating speed (vsb)
- при выпуске (уборке) посадочной фары — landing light operation speed
- при выпущенных интерцепторах (спойлерах), расчетная максимальная — design speller extended speed
- при выпуске (уборке) шасси, максимальная — maximum landing gear operating speed (vlo)
- при заходе на посадку и посадке, минимальная эволютивная — minimum control speed at арpreach and landing (vmcl)
- при (напр., взлетной) конфигурации самолета — speed in (takeaff) configuration
- при максимальной силе порыва ветра, расчетная — design speed for maximum gust intensity (vb)
- при максимальных порывах ветра, расчетная — design speed for maximum gust intensity
- при наборе высоты — climb speed
- при наборе высоты, наивыгоднейшая (оптимальная) — best climb speed
- при наборе высоты по маршруту на конечном участке чистой траектории — еn route climb speed at final net flight path segment
- принятия решения (v1) — (takeoff) decision speed (v1), critical engine failure speed (v1)
наибольшая скорость разбега самолета, при которой в случае отказа критич. двиг. (отказ распознается на этой скорости) возможно как безопасное прекращение, так и безопасное продолжение взлета. (рис. 113) — the speed at which, when an engine failure is recognized, the distance to continue the takeoff to а height of 35 feet will not exceed the usable takeoff distance, or, the distance to bring the airplane to а full stop will not exceed the accelerate-stop distance available.
- принятия решения относительная (v1/vr) — engine failure speed ratio (v1/vr ratio)
отношение скорости принятия решения v1 к скорости подъема передней стойки шасси vr. — the ratio of the engine failure speed, v1, for actual runway dimensions and conditions, to the rotation speed, vr
- принятия решения (v1), принятая при расчете макс. допустимого взлетного веса — critical engine failure speed (v1) assumed for max. allowable take-off weight max, allowable т.о. wt is derived from the corresponding critical engine failure speed (v1).
- при отказе критического двигателя (при взлете) — critical engine failure speed (v1)
- при отрыве носового колеса (см. скорость подъема передней опоры) (рис. 113) — rotation speed (vr)
- при предпосадочном маневре — (approach) pattern speed. overshooting the turn on final approach may occur with the higher (approach) pattern speed.
- при снижении — speed in descent
- при экстремальном снижении — emergency descent speed
- проваливания (резкая потеря высоты) — sink rate
- продольной составляющей ветра (график) — wind component parallel to flight path
- прохождения порога, максимальная — maximum threshold speed
- путевая (w) — ground speed (gs)
скорость перемещения самолета относительно земной поверхности, измеряемая вдоль линии пути. — aircraft velocity relative to earth surface measured along the present track.
- разбега, мннимально-эволю тивная (vmin эр) — round minimum control speed vmcg)
- разгерметизации — rate of decompression
- раскрытия (парашюта), критическая — critical opening speed
- рассогласования — rate of disagreement
-, расчетная — design speed
-, расчетная предельная (пикирования) — design diving speed (vd)
-, расчетная крейсерская — design cruising speed (vc)
-, расчетная маневренная — design maneuvering speed (va)
максимальная скорость, при которой максимальное отклонение поверхностей управления (элеронов,ph. рв) не вызывает опасных напряжений в конструкции ла. — the maximum speed at which application of full available aileron, rudder or elevator will not overstress the airplane.
- реакции — reaction rate
- реверса (поверхностей) управления — reversal speed
минимальная индикаторнаявоздушная скорость при которой возникает реверс поверхностей управления. — the lowest equivalent air speed at which reversal of control occurs.
-, рекомендованная изготовителем — manufacturer's recommended speed
-, рейсовая — block speed
-, рулежная — taxiing speed
- рыскания, угловая — rate of yaw, yaw rate
- сближения — closure /closing/ rate /speed/, rate of closure
скорость с которой два объекта приближаются друг к другу. — the speed at which two bodies approach each other.
- сближения с землей, опасная (чрезмерная) — excessive closure rate to terrain
- сваливания (vс) — stalling speed (vs)
скорость сваливания определяется началом сваливания самолета при заданных: конфигурации самолета, его полетном весе и режиме работы двигателей. — means the stalling speed or the minimum steady flight speed at which the airplane is controllabie.
- сваливания, минимальная (vсmin.) — minimurn stalling speed
- сваливания, приборная — indicated stalling speed
the indlcalcid air speed at the stall.
- сваливания при посадочной конфигурации (vсо) — stalling speed (vso). stalling speed or minimum steady flighl speed in landing configuration.
- сваливания при наработающих двигателях — power-off stalling speed
- сваливания при работающих двигателях — power-off stalling speed
- сваливания при рассматриваемой конфигурации самолета (vс1) — stalling speed (vs1). stalling speed or minimum steady. flight speed obtained in a specified configuration.
- сваливания с закрылками в посадочном положении, минимальная — minimum stalling speed with wing-flaps in landing setting
-, сверхзвуковая — supersonic speed
скорость, превышающая скорость звука, — pertaining to, or dealing with, speeds greater than the acoustic velocity.
- с выпущенными закрылками, максимальная — maximum flap extended speed (vfe)
- с выпущенными шасси, максимальная — maximum landing gear extended speed (vle)
максимальная скорость, при которой разрешается полет с выпущенным шасси, — maximum speed at which the airplane can be safety flown with the landing gear extended.
- скоса потока вниз — downwash velocity
- слежения за изменением высоты (корректором высоты) — rate of response to altitude variation /change/
- слива (откачки) топлива (на земле) — defueling rate, fuel off-loading rate
- снижения — speed of /in/ descent
-, снижения (напр., при посадке) — rate of sink, sink rate. touchdown at minimum rate of sink.
- снижения, вертикальная — rate of descent, descent /sink/ rate
- снижения в момент касания (водной поверхности при аварийной посадке на воду) — impact sink speed. the impact sink speed should be kept below 100 fpm to minimize the risk of a primary fuselage structural failure.
- снижения парашюта — parachute rate of descent
- снижения парашютов с единичным грузом — rate of descent of single cargo parachutes
- снижения, чрезмерная — excessive rate of descent, excessive sink rate
- сноса — drift rate
- согласования (гироагрегата) — rate of slaving, slaving rate
- согласования следящих сиетем (инерциальной системы) — servo loop slaving rate
- с отказавшим критическим двигателем, минимальная эеолютивная — minimum control speed with the critical engine inoperative (vmc)
- с полностью убранными закрылками, посадочная — zero flap landing speed
zero flap landing ground speeds are obviously high so fuel dumping may be necessary to reduce the bug speed.
- спуска, вертикальная — rate of sink, sink rate
touchdown at minimum rate of sink. perform high sink rate maneuver.
-, средняя — average speed
-, средняя эксплуатационная (коммерческая) — block speed
- срыва (см. скорость сваливания) — stalling speed (vs)
- схода (ракеты) с направляющей — launch(ing) speed
- тангажа, угловая — rate of pitch, pitch rate
-, текущая — current speed
ete calculation is based on current ground speed.
- (уборки) выпуска шасси, максимальная — maximum landing gear operating speed (vlo)
-, угловая — angular velocity
изменение угла за единицу времени, — the change of angle per unit time.
-, угловая — angular speed, angular rate, angular velocity
изменение направления за единицу времени, напр., отметки (цели) на экране радиолокатора. — change of direction per unit time, as for a target on a radar screen.
-, угловая инерционная (корпуса гироскопа относительно к-л. оси) — nertial angular velocity (of gyro case about the indicated axis)
-, угловая, (координатного сопровождающего) трехгранника (относительно земли) — angular velocity of moving соordinate trihedral
- у земли, минимальная эволютивная — minimum control speed near ground
-, установившаяся — steady speed
- установившегося полета, минимальная — minimum steady flight speed
- установившегося разворота, угловая — sustained turn rate (str)
- ухода гироскопа — gyro drift rate
- ухода гироскопа в азимуте — azimuth drift rate of the gyro
- флаттера, критическая — flutter speed
наименьшая индикаторная скорость, при которой возникает флаттер, — the lowest equivalent air speed at which flutter occurs.
"(-) число м" (кнопка) — v/m (button or key)
-, эволютивная (минимальная) — (minimum) control speed (vmc)
- эволютивная разбега, минимальная (vmin эр) — ground minimum control speed (vmcg)
-, экономическая — economic speed
скорость полета, при которой обеспечивается минимальный расход топлива на единицу пути в спокойном воздухе. — the flight speed at which the fuel consumption per unit of distance covered in still air, is а minimum.
-, экономическая крейсерская — economic cruising speed
-, эксплуатационная — operating speed
гашение с. — deceleration
на с. км/час — at а speed of km/hr
набор с. — acceleration
на полной с. — at full speed
нарастание с. — acceleration
переход к с. (набора высоты) — transition to (climb) speed
при с. км/час — at а speed of km/hr
разгон (ла) до с. — acceleration to speed of...
уменьшение с. (процесс) — deceleration
выдерживать с. (точно) — maintain /hold/ speed (accurately)
выражать значение с. полета в виде приборной (индикаторной) скорости — state (he speeds in terms of ias (eas)
гашение с. (перед выравниванием) — speed bleed-off (before flare)
гасить с. — decelerate
достигать с. (величина) — attain а speed of (... km/hr)
достигать с. (обозначание) — reach the speed (v1)
задавать с. — set up (speed, rate)
задавать с. км/час (при проверке барометрических приборов на земле) — apply pressure corresponding to а speed of... km/hr
набирать с. — gain /pick up/ speed, accelerate
увеличивать с. — increase speed, accelerate
уменьшать с. — decrease speed, decelerate
устанавливать с. (полета) — set up speedРусско-английский сборник авиационно-технических терминов > скорость
11 артемия
артемия
Мелкое (до 1 см) примитивное ракообразное отряда жаброногов (Branchipoda), встречается в солоноватых внутренних водоемах, в морских лиманах; А. способны жить в очень широком диапазоне солёности; во многих случаях образуются партеногенетические клоны (5n и выше), иногда выделяемые в самостоятельный вид Artemia parthenogenetica.
[Арефьев В.А., Лисовенко Л.А. Англо-русский толковый словарь генетических терминов 1995 407с.]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > артемия
12 быстрые нейтроны
быстрые нейтроны
Нейтроны, кинетическая энергия которых выше некоторой определенной величины. Эта величина может меняться в широком диапазоне и зависит от применения (физика реакторов, защита или дозиметрия). В физике реакторов эта величина чаще всего выбирается равной 0,1 МэВ.
[ http://pripyat.forumbb.ru/viewtopic.php?id=25]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > быстрые нейтроны
13 ИБП для централизованных систем питания
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > ИБП для централизованных систем питания
14 кабель
электрический кабель
кабель
Кабельное изделие, содержащее одну или более изолированных жил (проводников), заключенных в металлическую или неметаллическую оболочку, поверх которой в зависимости от условий прокладки и эксплуатации может иметься соответствующий защитный покров, в который может входить броня, и пригодное, в частности, для прокладки в земле и под водой.
[ ГОСТ 15845-80]
кабель
1. Одна или несколько изолированных токопроводящих жил или проводников, заключённых в герметическую оболочку с верхним защитным покрытием
2. Гибкий несущий элемент висячих систем, кабель-кранов и канатных подвесных дорог
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель электрический
Кабель 1. для передачи на расстояние электрической энергии либо сигналов высокого или низкого напряжений
[Терминологический словарь по строительству на 12 языках (ВНИИИС Госстроя СССР)]
кабель
Один или несколько скрученных изолированных гибких проводников, предназначенных для обматывания объектов контроля в целях их продольного или тороидного намагничивания.
кабель
Экранированный проводник, соединяющий электронный блок с преобразователем или электронные блоки между собой
кабель
-
[IEV number 151-12-38]EN
cable
assembly of one or more conductors and/or optical fibres, with a protective covering and possibly filling, insulating and protective material
[IEV number 151-12-38]FR
câble, m
assemblage d'un ou plusieurs conducteurs ou fibres optiques, muni d'une enveloppe protectrice et éventuellement de matériaux de remplissage, d'isolation et de protection
[IEV number 151-12-38]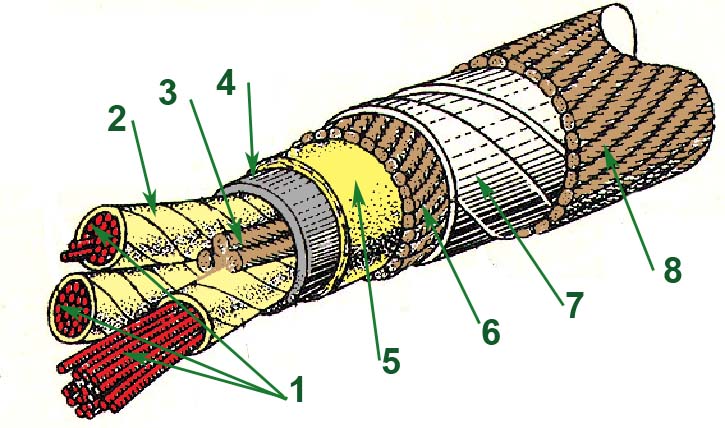
Пример конструкции кабеля:
1 - Токопроводящие жилы;
2 - Бумага, пропитанная маслом;
3 - Джутовый заполнитель;
4 - Свинцовая оболочка;
5 - Бумажная лента;
6 - Прослойка из джута;
7 - Стальная ленточная броня;
8 - Джутовый покров.
Кабели на напряжение до 1 кВ и выше...
[ГОСТ 12.2.007.14-75]
... силовые кабели с медными или алюминиевыми жилами с резиновой изоляцией, в свинцовой, поливинилхлоридной или резиновой оболочке, с защитными покровами или без них, предназначенные для неподвижной прокладки в электрических сетях напряжением 660 В переменного тока частотой 50 Гц или 1000 В постоянного тока и на напряжение 3000, 6000 и 10000 В постоянного тока.
Кабели предназначены для прокладки:
- на трассах с неограниченной разностью уровней.
- внутри помещений, в каналах, туннелях, в местах, не подверженных вибрации, в условиях отсутствия механических воздействий на кабель..
- в земле (траншеях), если кабель не подвергается значительным растягивающим усилиям
Строительная длина кабелей должна быть не менее 125 м. Допускаются маломерные отрезки длиной не менее 20 м в количестве не более 10 % от общей длины сдаваемой партии кабелей.
[ ГОСТ 433-73]
... монтажные многожильные кабели с поливинилхлоридной изоляцией и оболочкой, предназначенные для фиксированного межприборного монтажа электрических устройств, работающих при номинальном переменном напряжении до 500 В частоты до 400 Гц или постоянном напряжении до 750 В.
Требования к стойкости при механических воздействиях
- Кабели должны быть механически прочными при воздействии вибрационных нагрузок в диапазоне частот 1-5000 Гц с ускорением до 392 м/с2 (40 g).
- Кабели должны быть механически прочными при воздействии многократных ударов с ускорением 1471 м/с2 (150 g) при длительности удара 1-3 мс.
- Кабели должны быть механически прочными при воздействии одиночных ударов с ускорением 9810 м/с2(1000 g) и линейных нагрузок с ускорением до 4905 м/с2 (500 g).
Требования к стойкости при климатических воздействиях
-Кабели должны быть стойкими к воздействию повышенной температуры 343 К (70°С), при этом за повышенную температуру принимают температуру наиболее нагреваемого элемента конструкции кабеля.
- Кабели должны быть стойкими к воздействию пониженной температуры - 223 К (минус 50°С).
- Кабели должны быть стойкими к воздействию относительной влажности воздуха до 98 % при температуре 308 К (35°С).
- Кабели климатического исполнения Т должны быть стойкими к воздействию плесневых грибов.
[ ГОСТ 10348-80]
Тематики
- кабели, провода...
Классификация
>>>Обобщающие термины
Действия
- вводить кабель в отверстие
- вводить кабель в эксплуатацию
- наматывать кабель на барабан
- подключать кабель
- присоединять кабель
- прокладывать кабель
Синонимы
Сопутствующие термины
- неподвижная прокладка
- прокладка кабеля
- прокладка кабеля в земляной траншее
- прокладка кабеля непосредственно в грунте
- фиксированный межприборный монтаж электрических устройств
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > кабель
15 классы отходов
классы отходов
При построении системы классификации были приняты во внимание вопросы, которые представляются наиболее важными с точки зрения безопасности захоронения. В настоящее время исследуется ряд проблем, связанных с классификацией отходов. Иногда, например, в национальных системах классификации используются другие классы, которые указаны ниже (в квадратных скобках); эти классы приведены здесь с целью показать, как они в типичном случае соотносятся с классами, указанными в [45]. В других системах отходы классифицируются на основе других принципов, например, по их происхождению (отходы от эксплуатации реактора, отходы переработки, отходы, образующиеся в процессе снятия с эксплуатации, и оборонные отходы). Высокоактивные отходы (ВАО) {high level waste (HLW)} - радиоактивная жидкость, содержащая большую часть продуктов деления и актинидов, присутствующих в отработавшем топливе, которая представляет собой остаток от первого цикла экстракции растворителем в процессе переработки, и некоторые связанные с этим потоки отходов; такой материал, образующийся после отверждения; отработавшее топливо (если оно заявляется в качестве отходов); или любые другие отходы с аналогичными радиологическими характеристиками. Типичные характеристики высокоактивных отходов – это теплотворная способность свыше примерно 2 кВт/м3 и концентрации долгоживущих радионуклидов, превышающие ограничения для короткоживущих отходов [45]. Долгоживущие отходы {long lived waste} - радиоактивные отходы, которые содержат значительные уровни радионуклидов с периодом полураспада более 30 лет. Типичные характеристики – это концентрации долгоживущих радионуклидов, превышающие ограничения для короткоживущих отходов [45]. Короткоживущие отходы {short lived waste} - радиоактивные отходы, которые не содержат значительных уровней радионуклидов с периодом полураспада более 30 лет. Типичные характеристики – это ограниченные концентрации долгоживущих радионуклидов (ограничение долгоживущих радионуклидов до 4000 Бк/г в отдельных упаковках отходов и до общего среднего значения 400 Бк/г на упаковку отходов); см. пункты 324 и 325 в [45]. Низкоактивные отходы (НАО) {[low level waste (LLW)]} - см. низко- и среднеактивные отходы (НСАО). Низко- и среднеактивные отходы (НСАО) {low and intermediate level waste (LILW)} - радиоактивные отходы с радиологическими характеристиками, которыми обладают отходы в диапазоне от отходов, на которые распространяется изъятие, до высокоактивных отходов. Они могут быть долгоживущими отходами (НСАО-ДЖ) или короткоживущими отходами (НСАО-КЖ). Типичные характеристики низко- и среднеактивных отходов – это уровни активности выше уровней освобождения от контроля и теплотворная способность ниже приблизительно 2 кВт/м3 [45]. Многие государства подразделяют этот класс по другой схеме, например, на низкоактивные отходы (НАО) {low level waste (LLW)} и среднеактивные отходы (САО) {intermediate level waste (ILW)} или отходы средней активности (ОСА) {medium level waste (MLW)}, часто на основе критериев приемлемости отходов для приповерхностных хранилищ. Эти термины не следует употреблять в публикациях МАГАТЭ без прямо сформулированных определений для целей конкретной публикации. Отходы, на которые распространяется изъятие {exempt waste} - см. отходы. Отходы средней активности (ОСА) {[medium level waste (MLW)]} - см. низко- и среднеактивные отходы (НСАО). Очень низкоактивные отходы (ОНАО) {very low level waste (VLLW)} - радиоактивные отходы, которые регулирующий орган определяет пригодными для разрешенного захоронения при соблюдении определенных условий вместе с обычными отходами в установках, не предназначенных специально для захоронения радиоактивных отходов. Данная категория используется в некоторых государствах-членах; в других государствах она не применяется, поскольку любые виды радиоактивных отходов, каким бы низким не был уровень их активности, нельзя подвергать захоронению таким образом. Среднеактивные отходы (САО) {intermediate level waste (ILW)} - см. низко- и среднеактивные отходы (НСАО). Тепловыделяющие отходы (ТВО) {heat generating waste (HGW)} - радиоактивные отходы, которые являются достаточно радиоактивными для того, чтобы тепло радиоактивного распада значительно увеличивало их температуру и температуру окружающей их среды. На практике тепловыделяющие отходы – это обычно высокоактивные отходы, хотя некоторые виды среднеактивных отходов могут квалифицироваться как тепловыделяющие отходы.
[Глоссарий МАГАТЭ по вопросам безопасности]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > классы отходов
16 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
17 радиолокационный маяк-ответчик
радиолокационный маяк-ответчик
Радиолокационный маяк-ответчик обеспечивает определение местоположения судов, терпящих бедствие, посредством передачи сигналов, которые на экране радиолокационной станции представлены серией точек, расположенных на равном расстоянии друг от друга в радиальном направлении. РЛМО работает в диапазоне 9200 - 9500 МГц. На каждом борту любого пассажирского судна и грузового судна валовой вместимостью 500 рег. тонн и более должны быть, по крайней мере, два РЛМО. На судах валовой вместимости от 300 до 500 рег. тонн должен быть, по крайней мере,один РЛМО. Высота установленной антенны ответчика должна быть, по крайней мере, на 1 метр выше уровня моря. При этом он обеспечивает нормальную работу на расстоянии не менее 5 морских миль при запросе судового радара, антенна которого установлена на высоте 15 метров и не менее 30 морских миль при запросе авиационного радара с мощностью импульса не менее 10 кВт, установленного на борту летательного аппарата, находящегося на высоте 1000 м.
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > радиолокационный маяк-ответчик
18 тепловой расцепитель
тепловой расцепитель
Расцепитель, срабатывание которого зависит от теплового действия тока, проходящего через него.
[ ГОСТ 17703-72]EN
thermal release
device which prevents the maintenance of excessively high temperatures in certain parts of the apparatus by disconnecting these parts from their supply
NOTE PTC thermistors (see 2.7.8) are not thermal releases in the sense of this definition
[IEC 60065, ed. 7.0 (2001-12)]
thermal overload release inverse time-delay overload release depending for its operation, including its time delay, on the thermal action of the current flowing in the release
[IEC 60934, ed. 3.0 (2000-10)]FR
limiteur de température
dispositif destiné à empêcher le maintien de températures excessives dans certaines parties de l'appareil, en mettant ces parties hors tension
[IEC 60065, ed. 7.0 (2001-12)]
déclencheur thermique de surcharge déclencheur de surcharge à temps inverse dont le fonctionnement, y compris la temporisation, dépend de l'action thermique du courant qui traverse le déclencheur
[IEC 60934, ed. 3.0 (2000-10)]
В состав теплового расцепителя входит биметаллическая пластина, которая при нагреве выше определенной температуры изгибается, освобождая устройство, удерживающее главные контакты. Быстродействие биметаллической пластины прямо пропорционально значению протекающего через расцепитель тока. Тепловой расцепитель характеризуется тепловой инерцией, и после замыкания сработавшего автоматического выключателя время следующего срабатывания расцепителя уменьшается. В регулируемых расцепителях ток срабатывания можно установить в диапазоне от 0,4 до 1,0 от номинального тока.Тематики
- выключатель автоматический
- расцепитель, тепловое реле
Классификация
>>>EN
FR
Русско-английский словарь нормативно-технической терминологии > тепловой расцепитель
19 термометр сопротивления
термометр сопротивления
Термометр, принцип действия которого основан на использовании зависимости электрического сопротивления материала чувствительного элемента термометра от температуры.
[РД 01.120.00-КТН-228-06]Термометр сопротивления ТС это термометр, как правило, в металлическом или керамическом корпусе, чувствительный элемент которого представляет собой резистор, выполненный из металлической проволоки или пленки и имеющий известную зависимость электрического сопротивления от температуры. Самый популярный тип термометра – платиновый термометр сопротивления, это объясняется высоким температурным коэффициентом платины, ее устойчивостью к окислению и хорошей технологичностью. В качестве рабочих средств измерений применяются также медные и никелевые термометры. Новый межгосударственный стандарт на технические требования к рабочим термометрам сопротивления: ГОСТ 6651-2009, разработанный на основе российского стандарта ГОСТ Р 8. 625-2006 ( Термометры сопротивления из платины, меди и никеля. Общие технические требования и методы испытаний). Ознакомиться со стандартом можно в разделе Российские стандарты. В стандарте приведены диапазоны, классы допуска ТС, таблицы НСХ и стандартные зависимости сопротивление-температура. Эти данные приведены также на нашем сайте в разделе справочник. Главное преимущество термометров сопротивления – широкий диапазон температур, высокая стабильность, близость характеристики к линейной зависимости, высокая взаимозаменяемость. Пленочные платиновые термометры сопротивления отличаются повышенной вибропрочностью, но меньшим диапазоном температур. Изготавливаются также герметичные чувствительные элементы термометров сопротивления различных размеров, что позволяет их использовать в местах, где важно устанавливать миниатюрный датчик температуры. Недостаток термометров и чувствительных элементов сопротивления – необходимость использования для точных измерений трех- или четырех- проводной схемы включения, т.к. при подключении датчика с помощью двух проводов, их сопротивление включается измеренное сопротивление термометра. Важнейшей технологической проблемой для ТС проволочного типа является герметизация корпуса ЧЭ специальной глазурью, состав глазури должен быть подобран так, чтобы при колебаниях температуры в пределах рабочего диапазона не происходило разрушение герметизирующего слоя.
Промышленные платиновые термометры сопротивления в большинстве случаев используются со стандартной зависимостью сопротивление-температура (НСХ), что обуславливает допуск не лучше 0,1 °С (класс АА при 0 °С). Однако высокая стабильность некоторых термометров позволяет делать их индивидуальную градуировку и определять характерную именно для них зависимость сопротивление-температура. Такая градуировка может повысить точность до нескольких сотых градуса. Следует отметить, что использование функции МТШ-90 (что возможно сейчас для многих цифровых термометров) может точнее описать индивидуальную зависимость ТС, использование квадратичного уравнения Каллендара Ван Дьюзена ограничивает точность аппроксимации до 0,01-0,03 °С в зависимости от диапазона температур.
Эталонные платиновые термометры (ПТС, ТСПН) первого разряда и термометры-рабочие эталоны по точности превосходят промышленные термометры сопротивления (расширенная неопределенность ПТС 1 разряда при 0 °С равна 0,002 °С), но они требуют очень осторожного обращения, не выносят тряски и резких тепловых. Кроме того, их стоимость в десятки раз выше стоимости рабочих термометров сопротивления. Стандарт на образцовые ПТС первого и второго разряда: ГОСТ Р 51233-98 «Термометры сопротивления платиновые эталонные 1 и 2 разрядов. Общие технические требования» (см. раздел Российские стандарты). Подробная информация о свойствах эталонных платиновых термометров сопротивления и методах работы с ними приводится в разделе "Платиновый термометр сопротивления - основной интерполяционный прибор МТШ-90"
Для точного изменения криогенных температур с успехом применяются железо-родиевые термометры сопротивления. Их действие основано, на эффекте аномальной температурной зависимости сплава 0,5 ат.% железа к родию при низких температурах с положительным коэффициентом сопротивления. Опыт работы с термометрами показал, что их стабильность может достигать 0,15 мК/год при 20 К. Зависимость сопротивление - температура в диапазоне 0,5-27 К хорошо аппроксимируется полиномами не высоких степеней (8 -11 степень). Однако, сложности возникают при попытке аппроксимировать диапазоны, включающие 28 К, т.к. в этой точке «низкотемпературное» сопротивление, обусловленное примесями, уступает место «высокотемпературному» сопротивлению, обусловленному рассеянием на фононах....
[ http://temperatures.ru/pages/termometry_soprotivleniya]Недопустимые, нерекомендуемые
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > термометр сопротивления
20 управление аварийными сигналами
управление аварийными сигналами
-
[Интент]
Переход от аналоговых систем к цифровым привел к широкому, иногда бесконтрольному использованию аварийных сигналов. Текущая программа снижения количества нежелательных аварийных сигналов, контроля, определения приоритетности и адекватного реагирования на такие сигналы будет способствовать надежной и эффективной работе предприятия.Если технология хороша, то, казалось бы, чем шире она применяется, тем лучше. Разве не так? Как раз нет. Больше не всегда означает лучше. Наступление эпохи микропроцессоров и широкое распространение современных распределенных систем управления (DCS) упростило подачу сигналов тревоги при любом сбое технологического процесса, поскольку затраты на это невелики или равны нулю. В результате в настоящее время на большинстве предприятий имеются системы, подающие ежедневно огромное количество аварийных сигналов и уведомлений, что мешает работе, а иногда приводит к катастрофическим ситуациям.
„Всем известно, насколько важной является система управления аварийными сигналами. Но, несмотря на это, на производстве такие системы управления внедряются достаточно редко", - отмечает Тодд Стауффер, руководитель отдела маркетинга PCS7 в компании Siemens Energy & Automation. Однако события последних лет, среди которых взрыв на нефтеперегонном заводе BP в Техасе в марте 2005 г., в результате которого погибло 15 и получило травмы 170 человек, могут изменить отношение к данной проблеме. В отчете об этом событии говорится, что аварийные сигналы не всегда были технически обоснованы.
Широкое распространение компьютеризированного оборудования и распределенных систем управления сделало более простым и быстрым формирование аварийных сигналов. Согласно новым принципам аварийные сигналы следует формировать только тогда, когда необходимы ответные действия оператора. (С разрешения Siemens Energy & Automation)
Этот и другие подобные инциденты побудили специалистов многих предприятий пересмотреть программы управления аварийными сигналами. Специалисты пытаются найти причины непомерного роста числа аварийных сигналов, изучить и применить передовой опыт и содействовать разработке стандартов. Все это подталкивает многие компании к оценке и внедрению эталонных стандартов, таких, например, как Publication 191 Ассоциации пользователей средств разработки и материалов (EEMUA) „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке", которую многие называют фактическим стандартом систем управления аварийными сигналами. Тим Дональдсон, директор по маркетингу компании Iconics, отмечает: „Распределение и частота/колебания аварийных сигналов, взаимная корреляция, время реакции и изменения в действиях оператора в течение определенного интервала времени являются основными показателями отчетов, которые входят в стандарт EEMUA и обеспечивают полезную информацию для улучшения работы предприятия”. Помимо этого как конечные пользователи, так и поставщики поддерживают развитие таких стандартов, как SP-18.02 ISA «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности». (см. сопроводительный раздел „Стандарты, эталоны, передовой опыт" для получения более подробных сведений).
Предполагается, что одной из причин взрыва на нефтеперегонном заводе BP в Техасе в 2005 г., в результате которого погибло 15 и получило ранения 170 человек, а также был нанесен значительный ущерб имуществу, стала неэффективная система аварийных сигналов.(Источник: Комиссия по химической безопасности и расследованию аварий США)
На большинстве предприятий системы аварийной сигнализации очень часто имеют слишком большое количество аварийных сигналов. Это в высшей степени нецелесообразно. Показатели EEMUA являются эталонными. Они содержатся в Publication 191 (1999), „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Начало работы
Наиболее важным представляется вопрос: почему так велико количество аварийных сигналов? Стауффер объясняет это следующим образом: „В эпоху аналоговых систем аварийные сигналы реализовывались аппаратно. Они должны были соответствующим образом разрабатываться и устанавливаться. Каждый аварийный сигнал имел реальную стоимость - примерно 1000 долл. США. Поэтому они выполнялись тщательно. С развитием современных DCS аварийные сигналы практически ничего не стоят, в связи с чем на предприятиях стремятся устанавливать все возможные сигналы".
Характеристики «хорошего» аварийного сообщения
В число базовых требований к аварийному сообщению, включенных в аттестационный документ EEMUA, входит ясное, непротиворечивое представление информации. На каждом экране дисплея:
• Должно быть четко определено возникшее состояние;
• Следует использовать терминологию, понятную для оператора;
• Должна применяться непротиворечивая система сокращений, основанная на стандартном словаре сокращений для данной отрасли производства;
• Следует использовать согласованную структуру сообщения;
• Система не должна строиться только на основе теговых обозначений и номеров;
• Следует проверить удобство работы на реальном производстве.
Информация из Publication 191 (1999) EEMUA „Системы аварийной сигнализации: Руководство по разработке, управлению и поставке".
Качественная система управления аварийными сигналами должна опираться на руководящий документ. В стандарте ISA SP-18.02 «Управление системами аварийной сигнализации для обрабатывающих отраслей промышленности», предложен целостный подход, основанный на модели жизненного цикла, которая включает в себя определяющие принципы, обучение, контроль и аудит.
Именно поэтому операторы сегодня часто сталкиваются с проблемой резкого роста аварийных сигналов. В соответствии с рекомендациями Publication 191 EEMUA средняя частота аварийных сигналов не должна превышать одного сигнала за 10 минут, или не более 144 сигналов в день. В большинстве отраслей промышленности показатели значительно выше и находятся в диапазоне 5-9 сигналов за 10 минут (см. таблицу Эталонные показатели для аварийных сигналов). Дэвид Гэртнер, руководитель служб управления аварийными сигналами в компании Invensys Process Systems, вспоминает, что при запуске производственной установки пяти операторам за полгода поступило 5 миллионов сигналов тревоги. „От одного из устройств было получено 550 000 аварийных сигналов. Устройство работает на протяжении многих месяцев, и до сих пор никто не решился отключить его”.
Практика прошлых лет заключалась в том, чтобы использовать любые аварийные сигналы независимо от того - нужны они или нет. Однако в последнее время при конфигурировании систем аварийных сигналов исходят из необходимости ответных действий со стороны оператора. Этот принцип, который отражает фундаментальные изменения в разработке систем и взаимодействии операторов, стал основой проекта стандарта SP18 ISA. В этом документе дается следующее определение аварийного сигнала: „звуковой и/или визуальный способ привлечения внимания, указывающий оператору на неисправность оборудования, отклонения в технологическом процессе или аномальные условия эксплуатации, которые требуют реагирования”. При такой практике сигнал конфигурируется только в том случае, когда на него необходим ответ оператора.
Адекватная реакция
Особенно важно учитывать следующую рекомендацию: „Не следует ничего предпринимать в отношении событий, для которых нет измерительного инструмента (обычно программного)”.Высказывания Ника Сэнд-за, сопредседателя комитета по разработке стандартов для систем управления аварийными сигналами SP-18.00.02 Общества ISA и менеджера технологий управления процессами химического производства DuPont, подчеркивают необходимость контроля: „Система контроля должна сообщать - в каком состоянии находятся аварийные сигналы. По каким аварийным сигналам проводится техническое обслуживание? Сколько сигналов имеет самый высокий приоритет? Какие из них относятся к системе безопасности? Она также должна сообщать об эффективности работы системы. Соответствует ли ее работа вашим целям и основополагающим принципам?"
Кейт Джоунз, старший менеджер по системам визуализации в Wonderware, добавляет: „Во многих отраслях промышленности, например в фармацевтике и в пищевой промышленности, уже сегодня требуется ведение баз данных по материалам и ингредиентам. Эта информация может также оказаться полезной при анализе аварийных сигналов. Мы можем установить комплект оборудования, работающего в реальном времени. Оно помогает определить место, где возникла проблема, с которой связан аварийный сигнал. Например, можно создать простые гистограммы частот аварийных сигналов. Можно сформировать отчеты об аварийных сигналах в соответствии с разными уровнями системы контроля, которая предоставляет сведения как для менеджеров, так и для исполнителей”.
Представитель компании Invensys Гэртнер утверждает, что двумя основными элементами каждой программы управления аварийными сигналами должны быть: „хороший аналитический инструмент, с помощью которого можно определить устройства, подающие наибольшее количество аварийных сигналов, и эффективный технологический процесс, позволяющий объединить усилия персонала и технические средства для устранения неисправностей. Инструментарий помогает выявить источник проблемы. С его помощью можно определить наиболее частые сигналы, а также ложные и отвлекающие сигналы. Таким образом, мы можем выяснить, где и когда возникают аварийные сигналы, можем провести анализ основных причин и выяснить, почему происходит резкое увеличение сигналов, а также установить для них новые приоритеты. На многих предприятиях высокий приоритет установлен для всех аварийных сигналов. Это неприемлемое решение. Наиболее разумным способом распределения приоритетности является следующий: 5 % аварийных сигналов имеют приоритет № 1, 15% приоритет № 2, и 80% приоритет № 3. В этом случае оператор может отреагировать на те сигналы, которые действительно важны”.
И, тем не менее, Марк МакТэвиш, руководитель группы решений в области управления аварийными сигналами и международных курсов обучения в компании Matrikon, отмечает: „Необходимо помнить, что программное обеспечение - это всего лишь инструмент, оно само по себе не является решением. Аварийные сигналы должны представлять собой исключительные случаи, которые указывают на события, выходящие за приемлемые рамки. Удачные программы управления аварийными сигналами позволяют добиться внедрения на производстве именно такого подхода. Они помогают инженерам изо дня в день управлять своими установками, обеспечивая надежный контроль качества и повышение производительности за счет снижения незапланированных простоев”.
Система, нацеленная на оператора
Тем не менее, даже наличия хорошей системы сигнализации и механизма контроля и анализа ее функционирования еще недостаточно. Необходимо следовать основополагающим принципам, руководящему документу, который должен стать фундаментом для всей системы аварийной сигнализации в целом, подчеркивает Сэндз, сопредседатель ISA SP18. При разработке стандарта „основное внимание мы уделяем не только рационализации аварийных сигналов, - говорит он, - но и жизненному циклу систем управления аварийными сигналами в целом, включая обучение, внесение изменений, совершенствование и периодический контроль на производственном участке. Мы стремимся использовать целостный подход к системе управления аварийными сигналами, построенной в соответствии с ISA 84.00.01, Функциональная безопасность: Системы безопасности с измерительной аппаратурой для сектора обрабатывающей промышленности». (см. диаграмму Модель жизненного цикла системы управления аварийными сигналами)”.
«В данном подходе учитывается участие оператора. Многие недооценивают роль оператора,- отмечает МакТэвиш из Matrikon. - Система управления аварийными сигналами строится вокруг оператора. Инженерам трудно понять проблемы оператора, если они не побывают на его месте и не получат опыт управления аварийными сигналами. Они считают, что знают потребности оператора, но зачастую оказывается, что это не так”.
Удобное отображение информации с помощью человеко-машинного интерфейса является наиболее существенным аспектом системы управления аварийными сигналами. Джонс из Wonderware говорит: „Аварийные сигналы перед поступлением к оператору должны быть отфильтрованы так, чтобы до оператора дошли нужные сообщения. Программное обеспечение предоставляет инструментарий для удобной конфигурации этих параметров, но также важны согласованность и подтверждение ответных действий”.
Аварийный сигнал должен сообщать о том, что необходимо сделать. Например, как отмечает Стауффер из Siemens: „Когда специалист по автоматизации настраивает конфигурацию системы, он может задать обозначение для физического устройства в соответствии с системой идентификационных или контурных тегов ISA. При этом обозначение аварийного сигнала может выглядеть как LIC-120. Но оператору информацию представляют в другом виде. Для него это 'регулятор уровня для резервуара XYZ'. Если в сообщении оператору указываются неверные сведения, то могут возникнуть проблемы. Оператор, а не специалист по автоматизации является адресатом. Он - единственный, кто реагирует на сигналы. Сообщение должно быть сразу же абсолютно понятным для него!"
Эдди Хабиби, основатель и главный исполнительный директор PAS, отмечает: „Эффективность деятельности оператора, которая существенно влияет на надежность и рентабельность предприятия, выходит за рамки совершенствования системы управления аварийными сигналами. Инвестиции в операторов являются такими же важными, как инвестиции в современные системы управления технологическим процессом. Нельзя добиться эффективности работы операторов без учета человеческого фактора. Компетентный оператор хорошо знает технологический процесс, имеет прекрасные навыки общения и обращения с людьми и всегда находится в состоянии готовности в отношении всех событий системы аварийных сигналов”. „До возникновения DCS, -продолжает он, - перед оператором находилась схема технологического процесса, на которой были указаны все трубопроводы и измерительное оборудование. С переходом на управление с помощью ЭВМ сотни схем трубопроводов и контрольно-измерительных приборов были занесены в компьютерные системы. При этом не подумали об интерфейсе оператора. Когда произошел переход от аналоговых систем и физических схем панели управления к цифровым системам с экранными интерфейсами, оператор утратил целостную картину происходящего”.
«Оператору также требуется иметь необходимое образование в области технологических процессов, - подчеркивает Хабиби. - Мы часто недооцениваем роль обучения. Каковы принципы работы насоса или компрессора? Летчик гражданской авиации проходит бесчисленные часы подготовки. Он должен быть достаточно подготовленным перед тем, как ему разрешат взять на себя ответственность за многие жизни. В руках оператора химического производства возможно лежит не меньшее, если не большее количество жизней, но его подготовка обычно ограничивается двухмесячными курсами, а потом он учится на рабочем месте. Необходимо больше внимания уделять повышению квалификации операторов производства”.
Рентабельность
Эффективная система управления аварийными сигналами стоит времени и денег. Однако и неэффективная система также стоит денег и времени, но приводит к снижению производительности и повышению риска для человеческой жизни. Хотя создание новой программы управления аварийными сигналами или пересмотр и реконструкция старой может обескуражить кого угодно, существует масса информации по способам реализации и достижения целей системы управления аварийными сигналами.
Наиболее важным является именно определение цели и способов ее достижения. МакТэвиш говорит, что система должна выдавать своевременные аварийные сигналы, которые не дублируют друг друга, адекватно отражают ситуацию, помогают оператору диагностировать проблему и определять эффективное направление действий. „Целью является поддержание производства в безопасном, надежном рабочем состоянии, которое позволяет выпускать качественный продукт. В конечном итоге целью является финансовая прибыль. Если на предприятии не удается достичь этих целей, то его существование находится под вопросом.
Управление аварийными сигналами - это процесс, а не схема, - подводит итог Гэртнер из Invensys. - Это то же самое, что и производственная безопасность. Это - постоянный процесс, он никогда не заканчивается. Мы уже осознали высокую стоимость низкой эффективности и руководители предприятий больше не хотят за нее расплачиваться”.
Автор: Джини Катцель, Control Engineering
[ http://controlengrussia.com/artykul/article/hmi-upravlenie-avariinymi-signalami/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление аварийными сигналами
Страницы- 1
- 2
См. также в других словарях:
ГОСТ Р МЭК 62127-1-2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц — Терминология ГОСТ Р МЭК 62127 1 2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц оригинал документа … Словарь-справочник терминов нормативно-технической документации
СТО 70238424.29.240.10.002-2011: Распределительные устройства электрических станций и подстанций напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 70238424.29.240.10.002 2011: Распределительные устройства электрических станций и подстанций напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1.1 биологическая защита :… … Словарь-справочник терминов нормативно-технической документации
СТО 70238424.29.240.10.004-2011: Подстанции напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования — Терминология СТО 70238424.29.240.10.004 2011: Подстанции напряжением 35 кВ и выше. Организация эксплуатации и технического обслуживания. Нормы и требования: 3.1.1 бланк переключений : Оперативный документ, в котором приводится строгая… … Словарь-справочник терминов нормативно-технической документации
Психоакустика — Психоакустика научная дисциплина, изучающая психологические и физиологические особенности восприятия звука человеком. В аспекте сугубо музыкальном, основными задачами психоакустики являются следующие: понять, как система слухового… … Википедия
Astro-H — Логотип Рентгеновский космический телескоп Astro H (предыдущее название NeXT) аппарат, разрабатываемый Японским агентством аэрокосмических исследований (JAXA), шестой космический телескоп агентства. Ожидается, что он будет запущен в 2014 на … Википедия
АЭРОДИНАМИКА — раздел механики сплошных сред, в котором изучаются закономерности движения воздуха и других газов, а также характеристики тел, движущихся в воздухе. К аэродинамическим характеристикам тел относятся подъемная сила и сила сопротивления и их… … Энциклопедия Кольера
ВНЕАТМОСФЕРНАЯ АСТРОНОМИЯ — наблюдения астрономических объектов с помощью приборов, поднятых за пределы земной атмосферы на борту геофизических ракет или искусственных спутников. Ее основные разделы это астрономия высоких энергий (в рентгеновских и гамма лучах), оптическая… … Энциклопедия Кольера
Корреляция — (Correlation) Корреляция это статистическая взаимосвязь двух или нескольких случайных величин Понятие корреляции, виды корреляции, коэффициент корреляции, корреляционный анализ, корреляция цен, корреляция валютных пар на Форекс Содержание… … Энциклопедия инвестора
РАСПРОСТРАНЕНИЕ РАДИОВОЛН — процесс передачи эл. магн. колебаний радиодиапазона (см. РАДИОВОЛНЫ) в пространстве от одного места к другому, в частности от передатчика к приёмнику. В естеств. условиях Р. р. происходит в разл. средах, напр. в атмосфере, космической плазме, в… … Физическая энциклопедия
СОЛНЦЕ. — СОЛНЦЕ. Содержание: 1. Введение 2. Внутреннее строение 3. Атмосфера 4. Магнитные поля 5. Излучение 1. Введение С. газовый, точнее плазменный, шар. Радиус С. см, т. е. в 109 раз больше экваториального радиуса Земли; масса С. г, т. е. в 333000 раз… … Физическая энциклопедия
Nonfarm Payrolls — (Количество новых рабочих мест вне сельского хозяйства) Nonfarm Payrolls это макроэкономический показатель занятости населения США вне сферы сельского хозяйства Макроэкономический показатель занятости Nonfarm Payrolls, количество рабочих мест вне … Энциклопедия инвестора
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский